

超声波传感器(或换能器)的工作原理与雷达系统相同。超声波传感器可以把电能转换成声波,声波又可以把电能转换成声波。声波信号是传播频率在18kHz以上的超声波。著名的HC SR04超声波传感器产生40kHz频率的超声波。
通常,微控制器用于与超声波传感器通信。为了开始测量距离,微控制器向超声波传感器发送触发信号。对于HC-SR04超声传感器,该触发信号的占空比为10µS。当触发时,超声波传感器产生8个声波(超声波)爆发,并启动时间计数器。一旦接收到反射(回声)信号,计时器就停止。超声传感器的输出是一个高脉冲,其持续时间与发射的超声脉冲与接收到的回波信号之间的时间差相同。
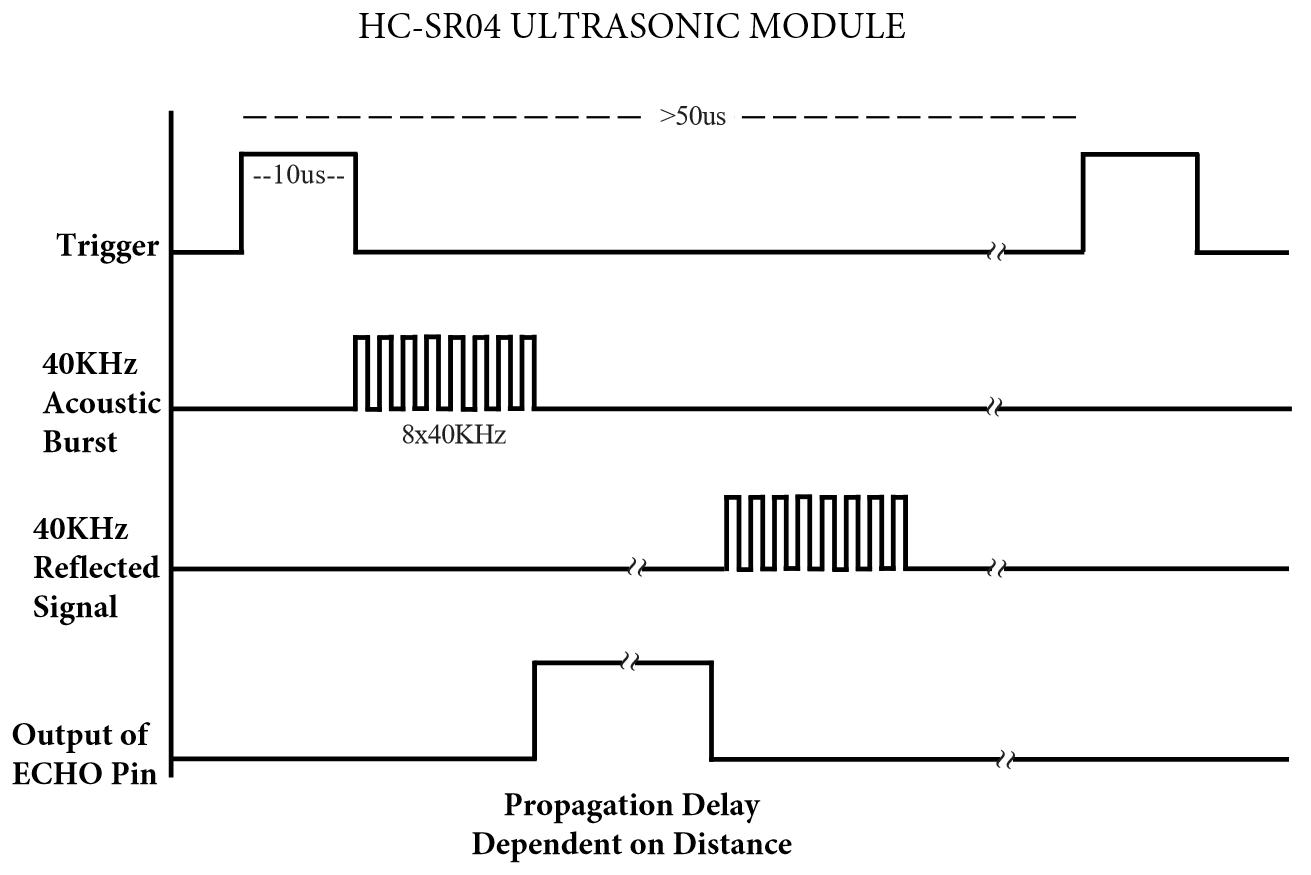
微控制器使用以下功能将时间信号解释为距离:

理论上,距离可以用TRD(时间/速率/距离)测量公式计算。由于计算的距离是从超声波换能器到物体的距离——再到换能器的距离——这是一个双向的行程。通过将这个距离除以2,可以确定从换能器到物体的实际距离。超声波以声速传播(20°C下343米/秒)。物体和传感器之间的距离是声波传播距离的一半。[iv]以下公式计算放置在超声传感器前面的物体的距离:

应用程序
许多工程领域都使用超声波传感器。“非接触”距离测量在自动化、机器人和仪器仪表中非常有用。下面,我们研究超声传感器的应用:
超声波风速计

气象站通常使用风速计,因为风速计能有效地探测风速和风向。二维风速计只能测量风速和风向的水平分量,而三维风速计可以测量风的垂直分量。
除了测量风速和风向外,超声波风速计还可以测量温度,因为超声波声波的速度受温度变化的影响,而不受压力变化的影响。温度是通过测量超声波的速度变化来计算的。
与杯形风速计和叶片风速计相比,超声波风速计没有活动部件,并利用超声波来运作,因此更耐用。(六)

潮流计
潮汐计被用来监测海平面。它还能探测潮汐、风暴潮、海啸、海浪和其他海岸过程。潮汐计可使用超声波传感器实时检测水位。该仪表通常与一个在线数据库相连,数据库中有记录,如果出现危险情况,系统可以触发警报。
坦克水平
测量水箱中的液位类似于潮汐计。然而,在这种情况下,液体可以是清水、腐蚀性化学物质或易燃液体。与光学传感器和浮子开关不同,超声波传感器不与流体接触,因此不太可能被腐蚀。
功能在阳光下
地球表面的阳光由大约52-55%的红外光组成。[ix]如果红外传感器使用红外光探测到一个物体,由于阳光中红外光的干扰,这一过程会受到干扰。然而,超声波传感器不受阳光中红外光谱的影响。
Web-guiding系统
网络导向系统定位平面材料(如报纸、塑料薄膜),并广泛使用超声波传感器。据Maxcess说,“1939年,Irwin Fife在俄克拉荷马州俄克拉荷马城的车库里发明了第一个网络指南,解决了报纸所有者在高速报纸印刷机上保持纸张整齐的挑战。网络导航系统使用非接触式传感器在多个阶段检测和跟踪目标。其目的是确保材料被正确定位。如果材料偏离了直线,系统就会机械地把它放回到机器的加工路径上。超声波传感器适用于网络引导系统,因为该过程需要非接触式、高速和高效的功能。
无人机导航
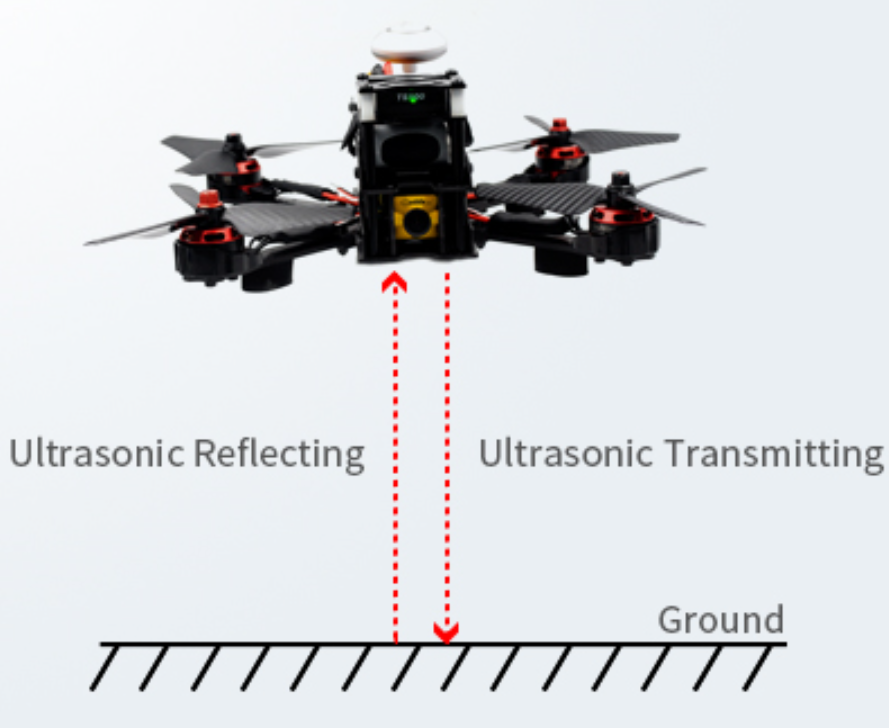
无人驾驶飞行器(UAV)——或无人机——通常使用超声波传感器来监测无人机路径上的任何物体和距离地面的距离。
自动探测安全距离的功能使飞机能够避免坠毁。由于飞行路径瞬间改变,超声波探测距离可以防止无人机坠毁。

超声波传感器的局限性
像HC-SR04这样的超声波传感器可以有效地测量高达400厘米的距离,误差只有3毫米。[xiii]然而,如果目标物体的位置使超声波信号偏离而不是反射回超声波传感器,那么计算出的距离可能是错误的。在某些情况下,目标物体太小,反射的超声信号不足以探测,无法正确测量距离。
此外,像织物和地毯这样的物体可以吸收声音信号。如果信号在目标物体的一端被吸收,它不能反射回传感器,因此,无法测量距离。

超声波传感器的高灵敏度使其效率很高,但这种灵敏度也会引起问题。例如,超声波传感器可以检测到空调系统干扰的电波和吊扇脉冲发出的错误信号。
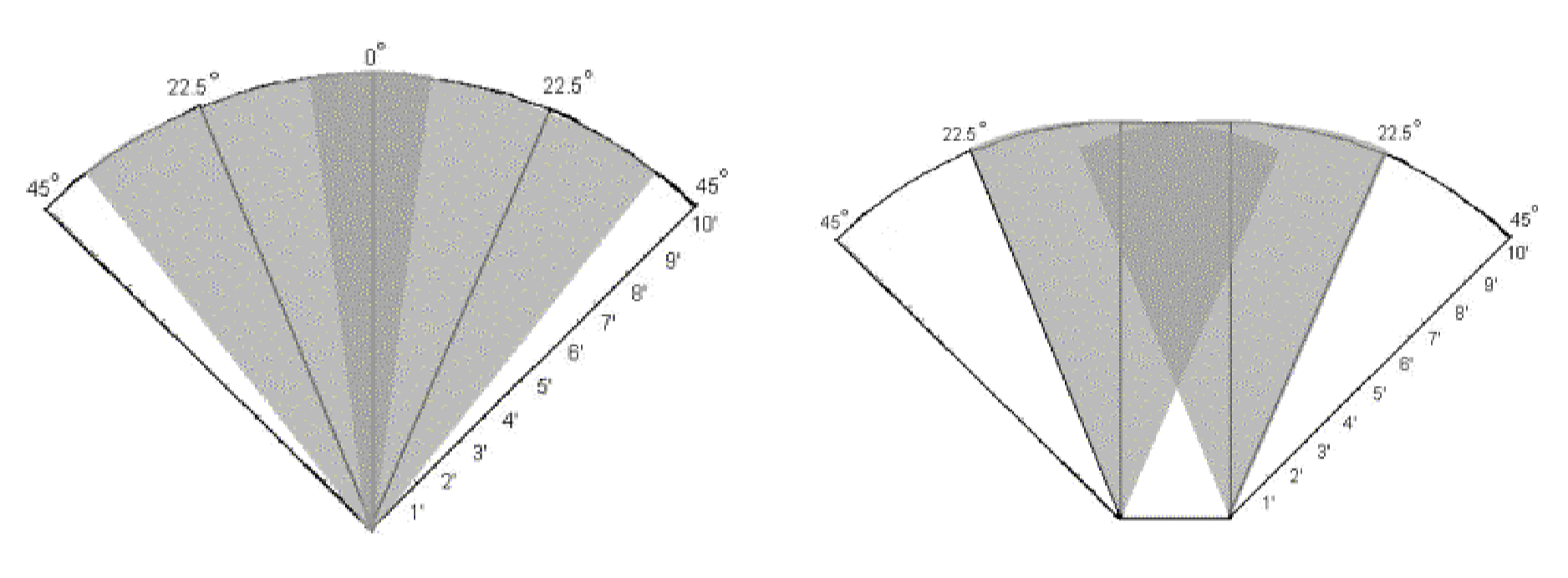
超声波传感器可以探测到放置在其范围内的物体,但它们不能区分不同的形状和大小。然而,可以通过使用两个传感器而不是一个传感器来克服这一限制。两个传感器的安装可以相隔一定距离,也可以相邻安装。通过观察重叠的阴影区域,可以更好地了解目标物体的形状和大小。
了下:传感器提示



