杜克大学的工程师们正在开发一种智能机器人系统,用于嗅出污染热点和有毒泄漏源。他们的方法使机器人能够结合在飞行中进行的计算来解释有限空间的复杂气流,而不是简单地“跟随它的鼻子”。
杜克大学机械工程和材料科学副教授迈克尔·m·扎拉夫诺斯(Michael M. Zavlanos)说:“许多现有的利用机器人来定位空气中颗粒来源的方法,都依赖于受生物启发的、受过教育的、但过于简单的猜测,或启发式技术,这些技术驱动机器人逆风或跟随浓度增加的方向。”“这些方法通常只能定位开放空间中的单一来源,并且无法估计其他同等重要的参数,例如释放率。”
但在复杂的环境中,这些简单的方法可能会让机器人在徒劳的追逐中进入空气流动物理人为增加浓度的区域,而不是因为它们是泄漏的来源。
杜克大学安德森-鲁普机械工程和材料科学教授威尔金斯·阿基诺(Wilkins Aquino)说:“如果有人在外面吸烟,只要跟着鼻子走就能很快找到他们,因为没有什么能阻止气流的可预测性。”“但是把同样的香烟放在办公室里,突然间就变得困难多了,因为走廊、角落和办公室产生的不规则气流。”
最近在网上发表的一篇论文中IEEE机器人技术汇刊取而代之的是,扎拉夫诺斯、阿基诺和刚毕业的博士研究生雷扎·科达伊-梅尔利用这些气流背后的物理学原理,更有效地追踪排放物的来源。
为了了解即使是一个简单的u形盒子内部气流的复杂性,研究人员使用红色粉笔跟踪空气羽流和运动。像这样的复杂性使得机器人很难简单地“跟随它们的鼻子”来定位气体泄漏的来源。杜克大学的研究人员已经制造了一个机器人,它不仅仅是跟随最强烈的气味,而是将浓度和气流的测量值插入一个复杂的偏微分方程中,然后决定在哪里进行另一次测量是最有用的。通过重复这个过程,它可以在一个有多种来源的复杂环境中,只需要十几次或两次尝试就能找到乙醇来源。图片来源:Reza Khodayi-mehr
他们的方法将源识别问题的基于物理的模型与机器人在反馈回路中的路径规划算法相结合。机器人测量环境中的污染物浓度,然后利用这些测量结果逐步计算出这些化学物质的实际来源。
Khodayi-mehr说:“创建这些基于物理的模型需要解决偏微分方程,这对计算要求很高,使得它们在小型移动机器人上的应用非常具有挑战性。”“为了提高计算效率,我们不得不创建简化的模型,但这也降低了计算的准确性。这是一个具有挑战性的权衡。”
Khodayi-mehr建造了一个矩形盒子,墙壁几乎将空间长度一分为二,创造了一个微型u形走廊,模仿了一个简化的办公空间。风扇将空气泵入U型一端的走廊,然后再从另一端抽出来,同时气态乙醇慢慢地泄漏到其中一个角落。尽管装置简单,但内部产生的气流是湍流和混乱的,这对任何乙醇嗅探机器人来说都是一个难以解决的来源识别问题。
但是机器人解决了这个问题。
机器人进行浓度测量,将其与之前的测量结果融合,并解决了一个具有挑战性的优化问题,以估计源的位置。然后,它找出最有用的位置进行下一次测量,并重复这一过程,直到找到源。
Zavlanos说:“通过将基于物理的模型与最优路径规划相结合,我们可以通过很少的测量来确定源的位置。”“这是因为基于物理的模型提供了在纯数据驱动的方法中无法考虑的测量之间的相关性,而最佳路径规划允许机器人选择具有最多信息内容的少数测量值。”
“基于物理的模型并不完美,但它们仍然比单独的传感器携带更多的信息,”阿基诺补充说。“它们不必是精确的,但它们允许机器人根据气流的物理特性做出推断。这导致了一种更有效的方法。”
这一系列复杂的问题解决不一定更快,但它更健壮。它可以处理多种来源的情况,这是目前启发式方法无法做到的,甚至可以测量污染率。
该小组仍在努力创建机器学习算法,以使他们的模型更加高效和准确。他们还在努力将这个想法扩展到为机器人舰队编程,以便在大范围内进行有系统的搜索。虽然他们还没有在实践中尝试过这种小组方法,但他们已经发表了模拟报告,证明了这种方法的潜力。
Khodayi-mehr说:“从受控的实验室环境到更实际的场景,显然还需要解决其他挑战。”“例如,在现实世界中,我们可能不知道进入域的几何形状。这些都是我们目前正在进行的研究方向。”
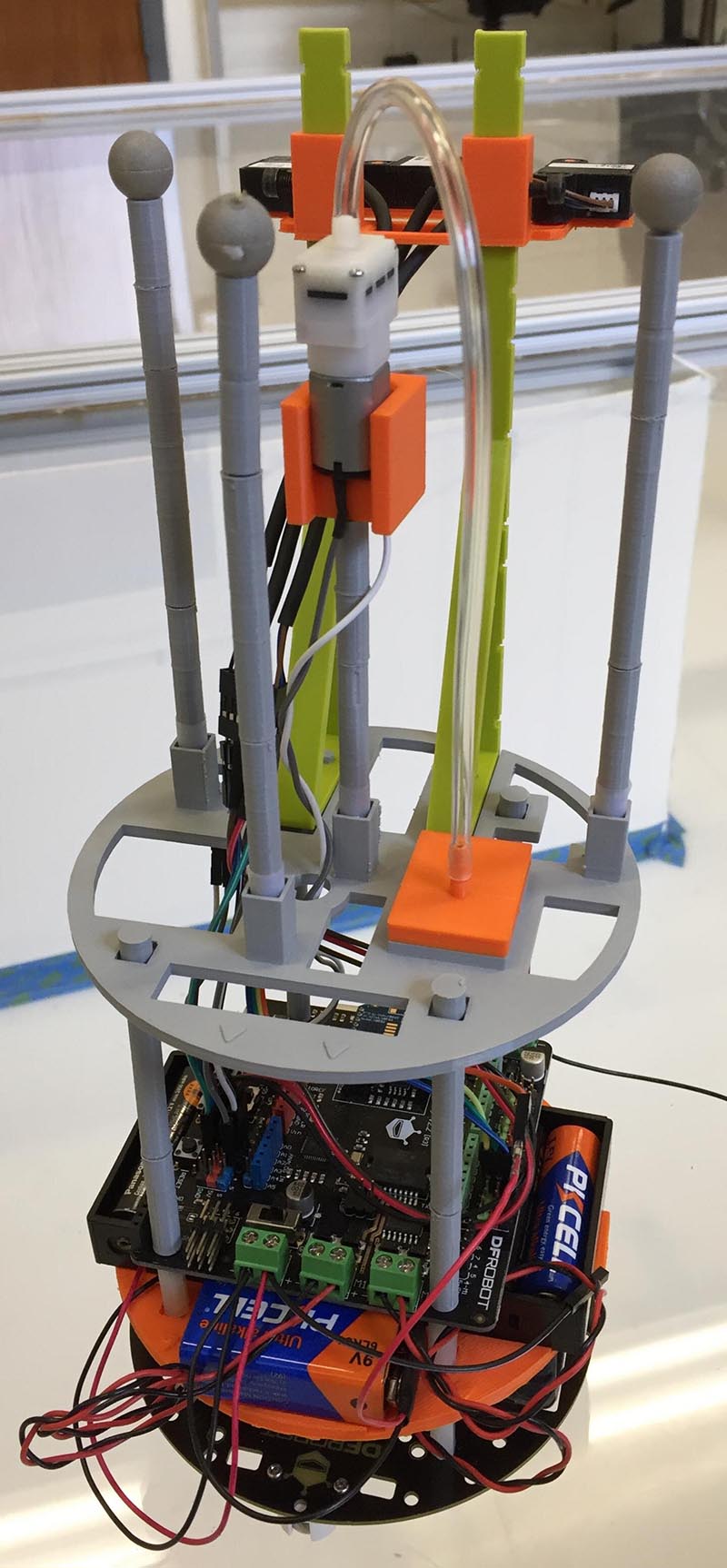
这个机器人可以用一种聪明的方法找出乙醇泄漏的来源。机器人不只是跟随最强烈的气味,而是将浓度和气流的测量输入一个复杂的偏微分方程,然后决定在哪里最有用进行另一次测量。通过重复这个过程,它可以在一个有多种来源的复杂环境中,只需要十几次或两次尝试就能找到乙醇来源。图片来源:Reza Khodayi-mehr
了下:产品设计