

 今天的定位表和工作台包括硬件和软件,比以往任何时候都更加定制,以满足特定的输出要求。这是为运动设计,即使是复杂的多轴命令也能准确移动。
今天的定位表和工作台包括硬件和软件,比以往任何时候都更加定制,以满足特定的输出要求。这是为运动设计,即使是复杂的多轴命令也能准确移动。
精确反馈是实现这种功能的关键——通常采用光学或(电子增强)磁编码器的形式,以实现纳米级分辨率和可重复性……甚至在长途旅行中也是如此。
事实上,微型舞台设计激发了反馈和控制算法的创新,甚至可以以亚亚微米的精度移动非常大的负载。
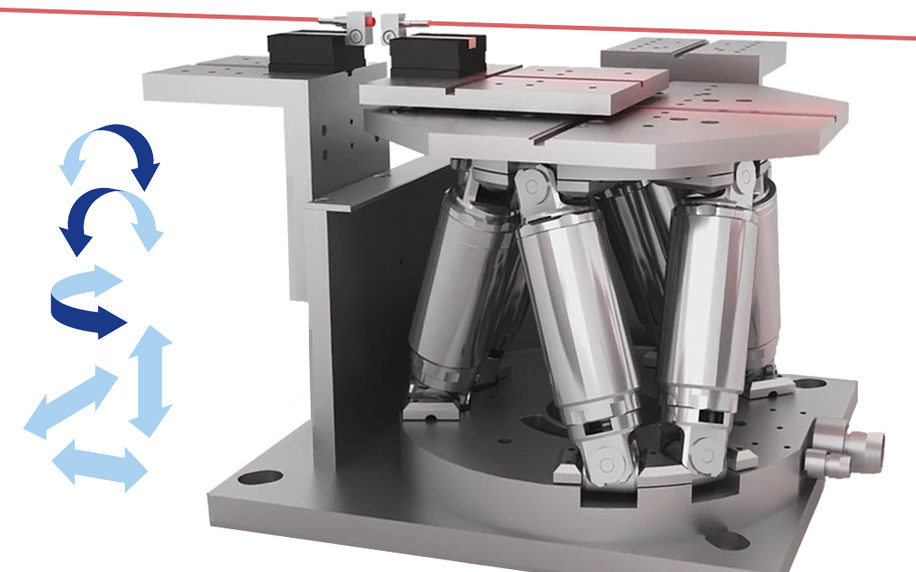
物理仪器(PI)现在出售H-811。F2高动态昆虫。设计用于光子学对准应用,六脚提供6个自由度,执行器分辨率为5纳米,重复性为60纳米,速度为20毫米/秒。六脚可承受5公斤的负载,具有可移动的磁性运动板,利用光纤组件加速工作流程。旅行是34毫米和42°旋转运动。
首先介绍一些背景:随着快速原型制作、自动化研究应用和更短的上市时间压力,预设计阶段和笛卡尔机器人的使用继续增加。这在光子学、医疗设备和半导体的研发和制造方面尤其如此。在过去,为自动化或其他改进任务构建多轴运动意味着设计工程师必须在内部寻找并将线性阶段组合成X-Y-Z组合。
任何更多的自由度都需要增加测角仪、旋转工作台和其他末端执行器。
称为串行运动学,这样的机器构建有时会导致由于公差叠加而累积错误的庞大设置.在某些情况下,轴承也将这样的组件限制在一个旋转中心。
当设计满足其运动要求时,这些都不是问题,但微型运动设计尤其不能原谅这些因素。
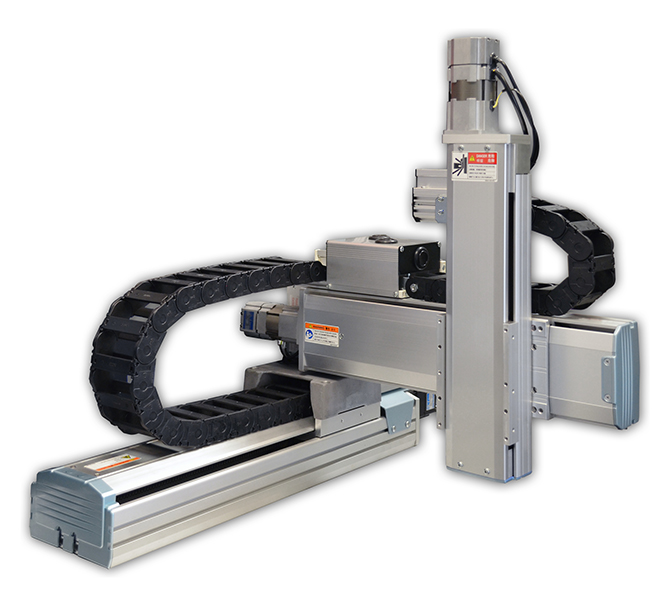
这个笛卡儿设置包括来自PHD, Inc.的组件(驱动器和线性幻灯片)。特别是在包装应用中,这些阶段越来越模块化。
对比这些构建与六足或Stewart平台-并联运动执行机构的形式.至少对于微型多轴运动组件,这些优于串行运动学。这部分是因为六脚的输出运动不受轴承(线性和旋转)额定值的限制。
相反,运动控制对应用程序定义的枢轴点(旋转中心)执行算法,不受误差累积的阻碍。更低的构件数量,更低的惯性和更高的刚度是其他的好处。
详见相关文章linearmotiontips.com在美国,传统的运动系统通常可以与具有平行运动的定位平台一起工作,传统的电磁电机与压电电机……甚至在普通的组装或安装上。
了下:线性运动技巧




告诉我们你的想法!