

 机器人领域一项令人兴奋的进展是所谓的协作机器人(cobots)的发展和日益流行。与传统的工业机器人不同,合作机器人的设计目的是在共享的工作空间与人类工人互动。它们通常比传统的工厂机器人更小,功能更弱,配备了各种接近传感器、负载传感器和其他功能,旨在避免机器人与周围工作人员发生危险碰撞。
机器人领域一项令人兴奋的进展是所谓的协作机器人(cobots)的发展和日益流行。与传统的工业机器人不同,合作机器人的设计目的是在共享的工作空间与人类工人互动。它们通常比传统的工厂机器人更小,功能更弱,配备了各种接近传感器、负载传感器和其他功能,旨在避免机器人与周围工作人员发生危险碰撞。
这种对安全的关注意味着协作机器人更容易部署在正常的工厂环境中,因为它们不需要特殊的围栏操作区域。合作机器人已被用于执行轻组装、包装、材料处理和医学实验室的重复性任务。合作机器人还被用于帮助工人避免直接接触不利于人类直接互动的环境,如高温环境、化学腐蚀性试剂和有毒病原体。
为Cobot Revolution实现技术
许多合作机器人被设计成模仿人类手臂,拥有灵活的“肩膀”、“肘部”和“手腕”关节。精确测量这些关节的旋转位置是使合作机器人的控制系统能够跟踪其所有运动部件的空间方向的关键。这通常是通过安装在每个设备接头的旋转编码器提供的。
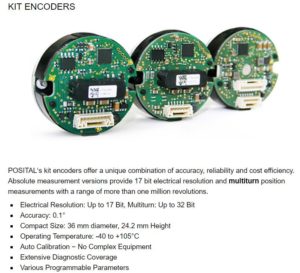
编码器测量旋转并返回向控制系统报告旋转角度(绝对编码器)或运动速率(增量编码器)的数字信号。Cobots的“正确”编码器需要准确,可靠,紧凑,具有出色的动态响应特性。他们还需要合理定价。Posital-Fraba.为了应对这一挑战,我们开发了新的传感技术,如磁性和电容式旋转编码器,为合作机器人制造商提供闭环控制系统的重要反馈。为了确保这些设备满足合作机器人建造者的需求,postal - fraba提供具有广泛性能特征、通信接口和物理配置的产品。
Posital-Fraba
www.posital.com/en/
了下:传感器提示,编码器(旋转)+分解器,机器人技术•机器人抓手•末端执行器




告诉我们你的想法!