

在美国宇航局的努力将学生放在创新和发现的中心。在美国宇航局的两个学生马歇尔太空飞行中心在阿拉巴马州的亨茨维尔,这意味着他们有了一个难以置信的机会,不仅可以在NASA最独特的测试设施之一留下自己的印记,还可以发布他们自己的开源软件。
来自宾夕法尼亚州伯斯西州斯法鲁尔大学的乔治·梅森大学的初级工程实习生Greta Studier开发了一个导航系统,模仿星际跟踪导航系统,这些系统将在小卫星上使用的空间,由静电帆目前在马歇尔开发。
“为了推进我们对静电帆的研究和开发,我们需要在测试实验室中提出一个定位导航系统来跟踪我们的机器人原型,”Studier说。“我们开发的系统提供了一种廉价的解决方案,使我们能够在5厘米以内跟踪机器人。”
机器人纳米空气轴承模拟器被实习生在马歇尔的发达国家和发展技术创新项目的部署测试静电帆马歇尔的平坦的地板上飞行机器人实验室,先进的测试设备,设有一个环氧地板设计允许工程师模拟运动帮助测试航天器的制导、导航和控制系统。
“我们真的为这些学生投入这个系统的工作而自豪,”汤姆布莱恩说,汤姆布莱说,“楼盘飞行机器人实验室的学生和高级工程师”。“他们对他们的成就非常适度,但他们在这里完成了我们的平面飞行机器人实验室的能力,并且可以对别人的开源软件非常有价值。”
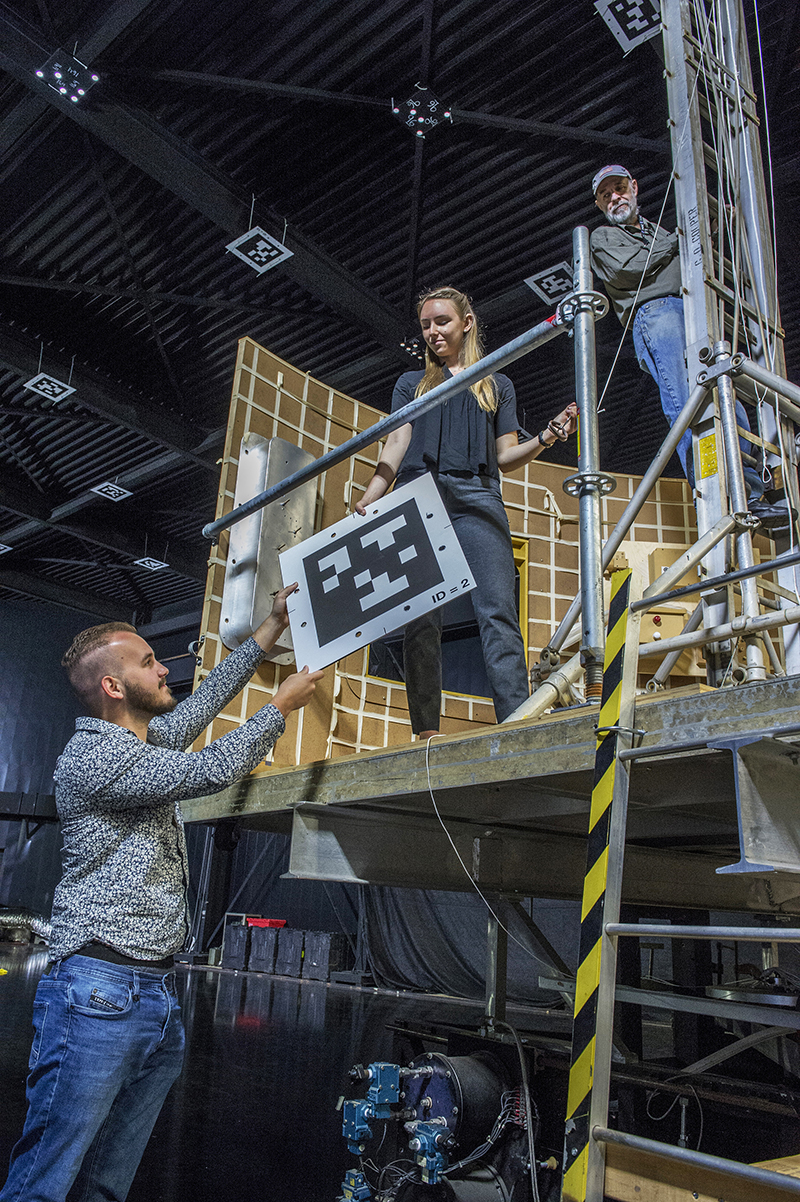
工程实习生Tristan Schuler,Left和Greta Studier,Centre,以及他们的导师汤姆布莱恩,在Marshall的平板机器人实验室的天花板上安装2D条形码。这些条形码是Schuler和Studier开发的导航系统的一部分,用于模仿NASA建议的赫兹e-sail将使用的星形跟踪导航系统。学分:NASA / EMMETT给出
学生的发明模拟了直接NASA的导航系统日球层顶静电快速传输系统通过卫星相对于恒星的位置来跟踪它的位置。被提议的赫特福德郡帆概念,推进式推进系统,将利用太阳风进入星际空间。这一潜在的革命推进系统可以将航天器送到太阳系的边缘,从以前比以往任何时候都更快。
学生们将AprilNAV命名为2D标签系统APRIGRAG.由密歇根大学开发。他们开始使用Aprigreags,修改代码以满足他们的需求。
“在学校,我在苏打水罐上使用了Aprintags,以指导一个机器人去罐头并抓住它,”Schuler说。“这个系统的美丽是它告诉相机,标签与相机相关的标签。通过这些信息,我们可以采取多个标签和平均坐标将坐标升起以提出相机的最佳位置。“
他们在泡沫板上打印了一系列类似二维码的2D条形码,并帮助他们按计算间隔安装到设施的天花板上。一个摄像头被放置在纳米空气轴承模拟器的顶部,这是一个由以前的实习生制造的机器人,由舒勒和Studier改进。当机器人漂浮在平坦的地板上时,摄像机被编程读取条形码。然后,机器人将其位置传递给学生。这个过程模拟了HERTS将如何使用太空中的恒星跟踪器作为导航到达日球层顶。
虽然AprilNAV是根据需要和特定目的开发的,但它可以用于许多不同的功能。这些学生与马歇尔大学的技术转移办公室合作,向公众发布了他们的代码。
“关于Aprilnav的好处是其他用户可以使用导航代码创建自己的控制系统,”Schuler说。“例如,如果他们想在房间里面控制Quadcopters,那么机器人实验就可以使用它。”
APRILNAV的代码无需支付费用software.nasa.gov和code.nasa.gov。
赫兹e-sail概念开发和测试由美国国家航空航天局提供资金空间技术任务理事会通过美国宇航局创新的先进概念计划它鼓励有远见的想法,通过创造彻底更好或全新的航天概念来改变未来的任务。NIAC项目研究创新的、技术上可信的、先进的概念,这些概念有一天可能“改变”航空航天领域的可能性。
提交:航空+国防



