

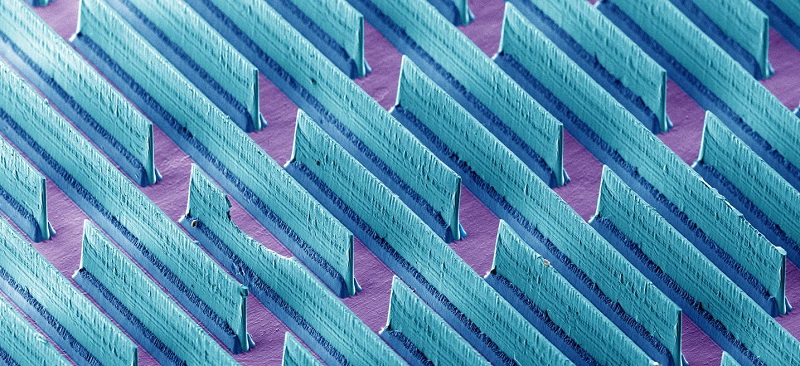
这是一张微观图像,展示了壁虎脚形成的壁壁,以模仿壁虎脚的粘附特性。图片来源:乔治亚理工学院
壁虎在墙上或天花板上蹦蹦跳跳的现象一直吸引着科学家们,促使他们研究如何利用蜥蜴的神秘能力来克服重力。
近年来,以壁虎足为灵感的人造设备已经出现,让佩戴者能够慢慢爬上玻璃墙,壁虎黏附技术的应用可能远不止蜘蛛侠式的滑稽动作。
乔治亚理工学院的一名研究人员正在研究如何将该技术应用于高精度工业环境,例如用于制造计算机芯片的机械臂。
佐治亚理工学院机械工程学院的助理教授迈克尔·瓦伦伯格(Michael Varenberg)说:“壁虎粘附在工业环境中有多种用途,尤其是处理精密材料,如制造计算机处理器所用的硅片。”
但在机器人手臂和其他设备能够实现壁虎粘附技术之前,研究人员需要更多关于人造粘附表面的机械和物理特性的信息。
12月13日发表在皇家学会界面杂志Varenberg研究了一种特殊类型的受壁虎启发的粘合剂表面,并缩小了该材料附着更牢固、更容易释放抓地力的角度范围。
壁虎通过其微小的毛发在分子间水平上与表面相互作用而获得其独特的能力。在这一过程中,微小的薄膜状毛发被压在表面上,并进行剪切作用。然后,它们要么粘在水面上,要么在被从不同方向拉开时轻松释放。
为了在使用人造粘合剂技术的工厂中复制这一过程,研究人员必须确定施加载荷的精确角度,以获得或释放机械臂与硅片之间的抓地力。
Varenberg的团队测试了用聚乙烯基硅氧烷制成的壁状微结构表面,该表面旨在模仿壁虎的附着能力。他们的试验表明,最佳附着角度在60 ~ 90度之间,而当拉拔角度达到140 ~ 160度时,微结构以零力分离。
Varenberg说:“控制这些壁状微结构的附着和拉扯的相对较宽的范围,将使围绕这种公差建立一个机械过程更容易。”
这将有望取代目前在计算机处理器生产中硅晶圆的加工和检验过程中使用的方法。机械臂采用陶瓷夹头,利用真空或静电夹持器来夹起和处理晶圆片。安装后不久,陶瓷接触柱开始磨损,由于循环加载和释放颗粒可能污染晶圆背面,导致其正面的光刻缺陷。
Varenberg说:“这种情况与半导体行业要求的清洁标准不一致。”“使用壁虎粘附微结构会更好,因为它们不会对晶圆产生任何损伤,也不会随着时间的推移磨损。”
Varenberg说,研究的下一步包括简化制造技术,使用工业级材料,以及研究环境和表面几何参数的影响。
了下:•先进的材料



