

编辑特里个人而言光探测和测距(激光雷达)在汽车工业中的应用正呈指数级增长。两种最常见的变化是固态激光雷达和混合旋转激光雷达。
固态激光雷达是非自旋系统。有些采用相控阵来控制激光束,不需要移动部件;其他的包括一个控制激光束的小镜子。还有一种叫做闪光激光雷达的固态设计,在一次闪光中照亮整个场景,通过二维传感器阵列检测返回的光——类似于数码相机的操作。由于运动部件很少,这些方法提供了经济有效的激光雷达功能。
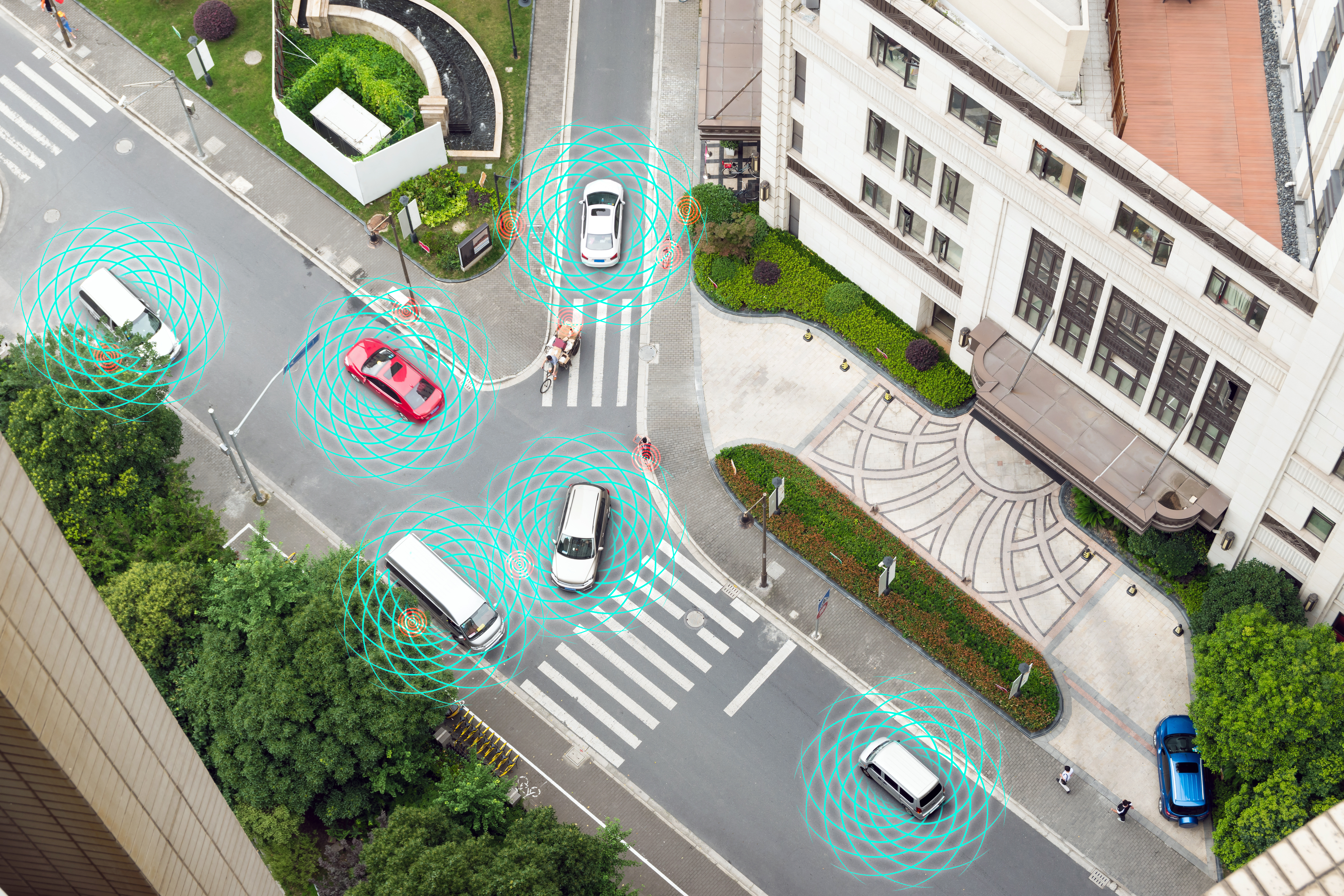
装有远程激光雷达的车辆可以提前预测刹车的需要——将必要的减速降低到一个不太可能伤害乘客的速率。无框直流电机可以使这些激光雷达设计更加紧凑。
有时制造商把所有的激光雷达电子设备都放在一个芯片上,包括激光器、任何光束转向电路、用于返回信号的探测器和支持的计算机电源。但固态激光雷达的单芯片解决方案容易受到环境挑战,如热、冷、湿、雨和腐蚀性物质。需要维修系统的终端用户通常会发现更换ic的成本很高。更重要的是,制造商越来越多地寻求提供更低成本的模块化选择,允许单个组件更换。
后者非常重要,因为典型的固态激光雷达设置提供了一个120°或更小的固定视场。这意味着至少需要四个小队才能覆盖整个360°的安全区域。这与旋转激光雷达系统形成了鲜明对比,旋转激光雷达系统覆盖360°操作,没有由于间隙或重叠而导致的盲点,这是固态系统固有的问题。
此外,安全规则规定,激光雷达不能产生能够损害人的视力的激光输出,即使那个人直接盯着激光雷达装置几秒钟。
固态混合激光雷达的原因
混合激光雷达利用了固态和旋转激光雷达的优点。这些设计有一个无缝的、可重复的视野。此外,安全法规允许移动的激光源发射出比静止的更高功率的光束。因此,更强大的激光可以让混合旋转激光雷达单元绘制更大范围的地图,(当纳入自动操作系统时)帮助车辆避免短时间停车的需要,并避免乘客身体创伤的风险增加。因此,尽管固态激光雷达越来越普遍,但要求较高的应用(包括自动驾驶汽车)仍将采用比其他系统更强大的远程操作、更高的分辨率和更广阔的视野的混合动力系统。
正如我们将看到的,削减这些激光雷达设计的成本和足迹有时意味着使用替代通常的无刷直流(BLDC)电机用于其旋转动作。
激光雷达系统不需要的马达部件
回想一下,无刷直流电机比有刷电机更强大,并避免了与换向刷相关的摩擦和电压降。这就是为什么激光雷达系统中使用无刷直流电机。旋转激光雷达设计通常转速为200到500转。电机转动的镜子总成很轻,所以扭矩通常不是一个问题。但是现在许多激光雷达系统使用的是现成的NEMA 17和NEMA 23发动机,这可能会造成不必要的笨重。

无刷直流电机是混合激光雷达系统的关键。但随着汽车行业致力于缩小激光雷达系统,标准电机产品的内置组件(在其他设计中很有用)有时会成为一种不利因素。
这是因为大多数OtS无刷直流电机在结构和机械上是自给自足的。端盖将转子悬挂在定子内部;然后激光雷达的移动组件连接到输出轴上。事实上,电机的末端可以很容易地占到电机总长度的50%。
相比之下,无框电机省略了额外的安装支撑,板,支架和联轴器,让设计工程师直接将负载集成到转子设计中;此外,定子可以无缝地集成到系统中,以实现更小的设计,而不牺牲性能。
配有紧凑型激光雷达马达的时髦汽车
空气动力学和视觉造型在汽车设计中至关重要。对于工程师来说,将更宽更平的外形融入到汽车外观中要比将高窄的外形融入到汽车外观中要容易得多。无框电机可以提供这种几何形状-大直径和较低的高度比可比OtS无刷直流电动机。此外,部分激光雷达镜像负载可以下沉到无框设计的定子中。这两个选项都有助于降低激光雷达的整体高度,以实现流线型形状。
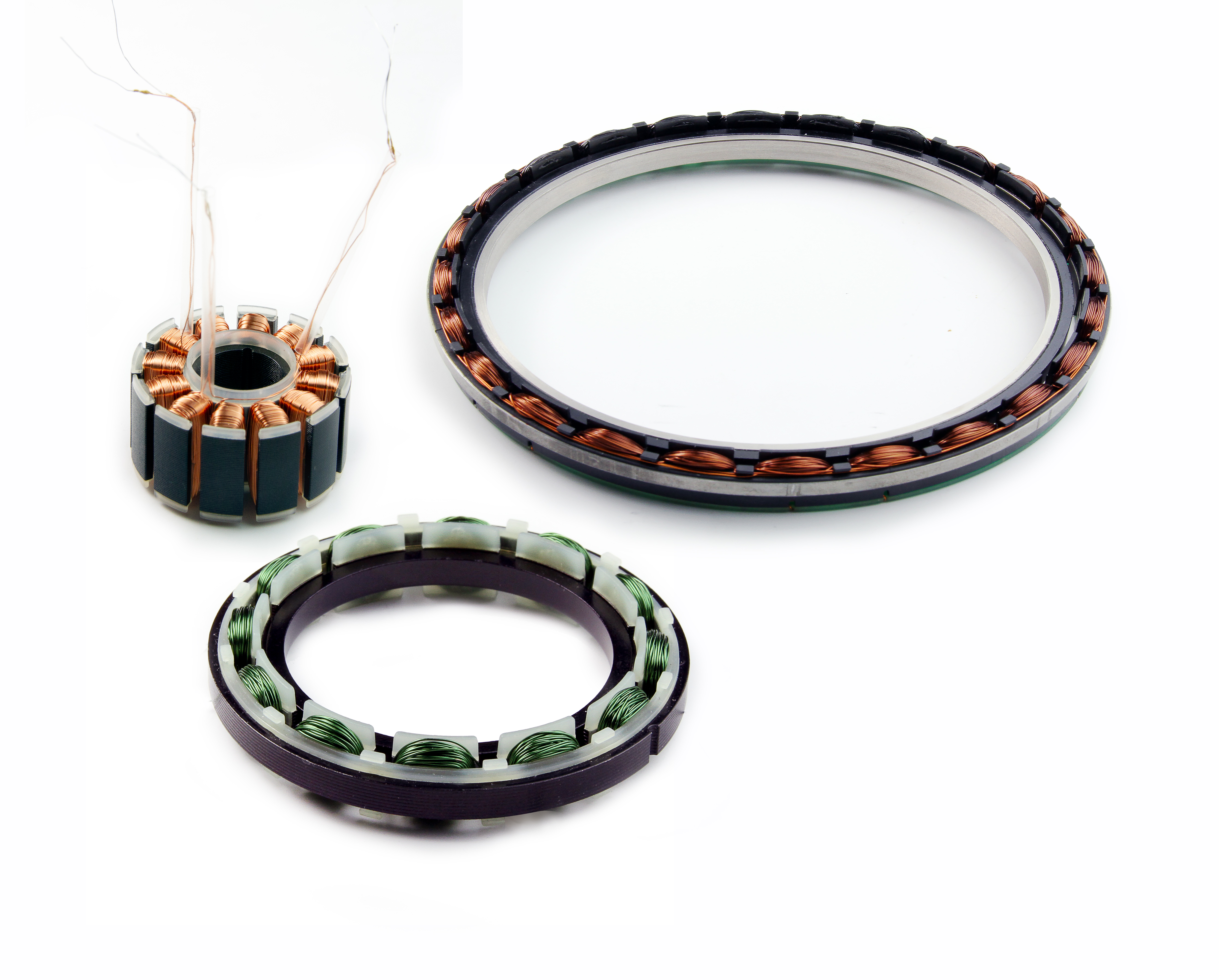
无框电机-如这些来自林工程-集成到设计中,以减少浪费和多余的安装支架,板,和支架。它们也省略了末端帽,可以很容易地占到整个电机总长度的50%。
无框电机不受标准尺寸电机的限制,因此给设计工程师更多的自由来定制电机的形状和尺寸的应用。这使得激光雷达系统的占地面积尽可能小。当与固态技术的轻量级传感器配合使用时,电机需要移动的质量更小,需要满足的扭矩要求更低,从而允许更小的电机完成工作。
现成的马达对于激光雷达系统来说可能是超大的。相比之下,定制电机通常更紧凑(如果大量供应),从长远来看,可以在制造和生产上节省数千美元。欲了解更多信息,请访问林工程linengineering.com.
了下:运动控制技巧,法兰•支架•支架•支架




早上好,
我想知道是否有可能使用同样的技术,并切换到直流和/或交流发电机?
最好的问候,
比尔Muscarella
(电子邮件保护)
470.349.6017