

协作机器人的使用正呈指数级增长。“这一趋势是所谓的第四次工业革命或工业4.0的完美例子,这一术语是由世界经济论坛主席克劳斯·施瓦布定义的。它模糊了数字、物理和生物领域之间的界限,”Trinamic运动控制公司的Jonas Proeger说。
这些机器人设计中的一些并不大于人肢,这意味着它们需要苛刻的电子产品要求,注意到。一切都必须更具成本效益,因为目标数量要高得多,但同时,这些运动组件必须特别紧凑。
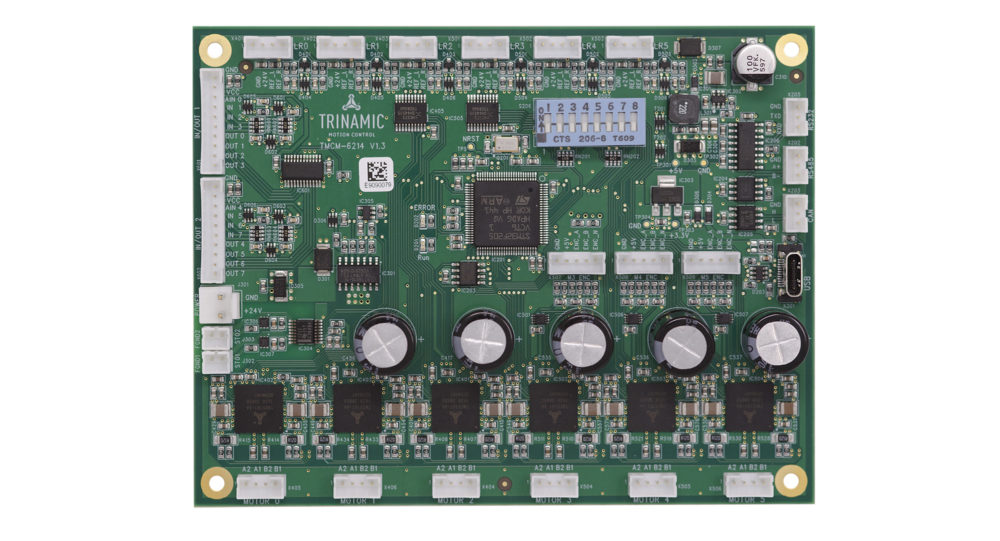
这是Trinamic的TMCM-6214。具有六点斜坡轮廓和多个编码器输入,TMCM-6214六轴电机控制器/驱动板的两相步进电机简化了机器人的设计,工业自动化,和其他先进的多轴运动控制系统。
“因此,除了机器人之外,没有空间容纳六个伺服驱动箱……或者大型控制柜。”一切都必须在手臂上——理想情况下,就在机器人的关节上,”Proeger说。
例如:Elmo运动控制EtherCAT黄金伺服驱动器直接安装到机器人关节上Siasun协作机器人同事.两个小型金SOLO吉他驱动两个基本关节电机,支持机器人的机械结构。能够驱动电机的电流到50 A(和峰值电流到100 A),让驱动器提供所需的电力快速移动。另外五个金色SOLO哨子驱动驱动机器人的其他五个关节。
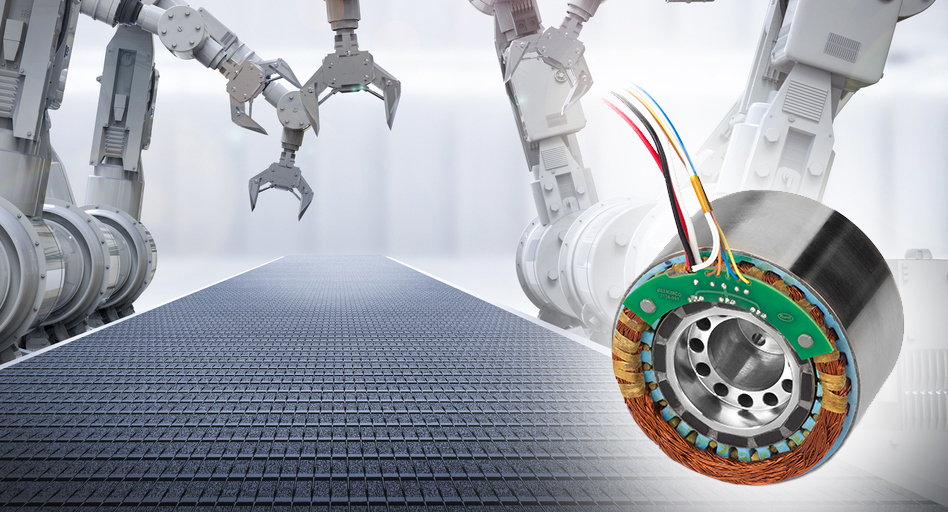
无框架扭矩电机是机器人关节的领先选择
除了需要紧凑的电子产品外,合作机器人还需要紧凑型电机进行致动。“在合作机器人领域,我们看到更多对无框架扭矩电机感兴趣的OEM。他们还在寻找具有高功率密度的小直径电机,“盟军盟友技术系统工程师Jeffrey Shearer。
无框无刷的直流(BLDC.)此处适用于在光制造和半导体应用中的多轴组装机器人。来自Sensata Technologies的Bei Kimco,2.6,3.0和3.8英寸。O.D.电动机从85到531盎司提供峰值扭矩载荷。紧凑的尺寸对于拟合铰接式机器人手腕,肘部和肩轴至关重要。电动机稳健性和优化的扭矩 - 热性能可确保在连续占空比中的可靠操作。
采用类似的应用包括这些设计要求的应用包括用于物理治疗的髋关节和医疗机器人。
Proeger说:“在2010年为KUKA YouBot开发驱动器时,我们获得了类似这样的小型机器人的早期经验。“展望未来,我们预计协作机器人将推动人们对可负担且易于使用的功能性安全组件的需求……因为它们是与人类操作员一起工作,所以必须是安全的——但不是由安全专家开发的。”因此,我们预计对经过验证的构建模块的需求将不断增加,这些模块可以让开发人员更容易获得认证的功能安全。”
其他人也同意这些设计的安全性。
以今天的汽车工厂为例,在工厂的地板上,人类和机器人是隔离的……例如,如果工人越过设置的障碍,移动车架的机器将自动停止工作。“在不太遥远的未来,机器视觉和机器学习等技术的进步将让更大的合作机器人在这些环境中与人类合作,”模拟设备公司(Analog Devices)的布兰登·奥多德(Brendan O’dowd)说。
当然,处理大负荷的能力越来越强的合作机器人比较小的合作机器人更强大,更有能力造成损害——这放大了对安全的需求。但奥多德指出,解决这些大型合作机器人的安全问题不能简单地排除。
“对ISO标准量身定制的Cobots肯定满足安全要求,但新功能总是要求行业发展新的准则。例如,Cobots可以设定速度限制;保持下面的这些限制使Cobots对人类安全。此功能的关键是新的飞行时间传感器,包括相机系统,雷达和延裙,“o'dowd添加。
有关LIDAR系统中无框架电机的更多详细信息,请阅读这个故事来自林工程公司.有关协作机器人的更多信息,请访问therobotreport.com上的文章库.
提交:运动控制技巧那电机(直接驱动)+无框架电机那电机•步进那机器人•机器人夹具•终点效果




告诉我们你的想法!