

原始伺服驱动器是模拟类型在±10伏的输入电压下工作,但数字伺服驱动器运行现场总线网络现在主导着市场。数字驱动器和模拟驱动器在结构上的主要区别是,数字驱动器包括一个微处理器,它根据系统行为的数学模型进行计算,以确定输出控制信号。
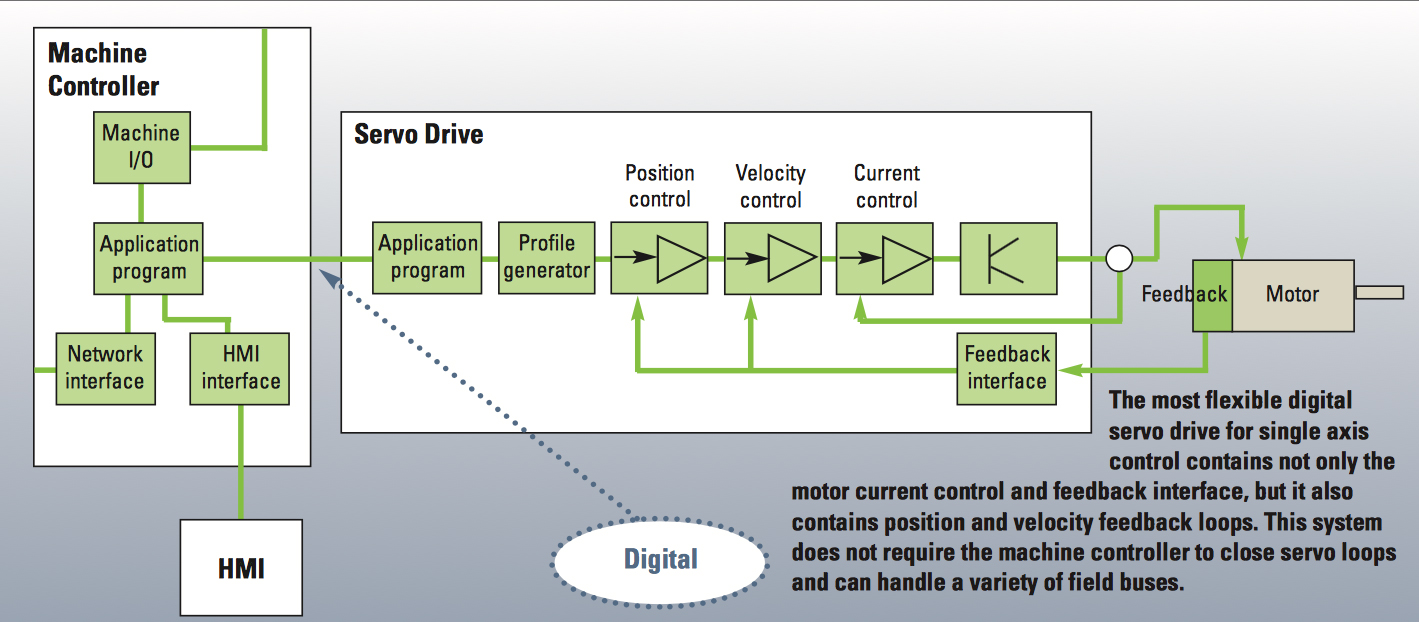
大多数数字驱动器可以接受从转速计,分离器,编码器和各种类型的交换机或传感器的反馈。除了管理扭矩,速度和位置之外控制循环在美国,数字伺服驱动器通常包括更高级别的功能,包括传统上由机器控制器处理的操作,如路径生成。
虽然模拟伺服驱动器相对便宜和简单的设置,有使用数字伺服驱动器的好处。首先,数字驱动器是通过软件调整的,而不是用电位器手动调整。大多数数字驱动器还可以自动调谐或自调谐,这是特别有用的,当负载或惯性参数难以建模或预测。这也简化了调优过程,并提供了响应速度更快的系统。因为所有配置和调优设置都存储在驱动器中,所以跨多个驱动器复制特定设置也更容易。
图片来源:Kollmorgen
自动调整或自我调整是一个过程,其中自动设置伺服控制环路。驱动器以各种频率激发电机,以感测系统的惯性和响应,然后确定并设置适当的增益,以确保所有各种频率的稳定性。
使用数字伺服驱动器,电压脉冲以更高的频率发送到电机——通常是模拟驱动器的5倍或更多。这使电机响应命令更快,并提供更平稳的加速和减速。它也给伺服系统更高的保持扭矩。
数字伺服驱动器功能多样。大多数数字驱动器能够使用模拟电压信号,就像模拟伺服驱动器一样,有些甚至可以接受步进和方向信号来作为步进驱动器。当需要主轴和从轴时也可使用,带有电子传动装置或轴之间的电子凸轮。
图片来源:派克汉尼汾公司
了下:运动控制提示,驱动器(步进器)+放大器,运动控制•电机控制




告诉我们你的想法!