

如果你设计、安装或故障检修运动控制系统,你可能很熟悉PID(比例 - 积分 - 导数)控制,它使用反馈来检测所需位置和实际位置之间的错误,并应用纠正命令以补偿这些错误。虽然PID控制是最常见的工业控制器类型,但它确实有局限性。首先,PID控制通常不适用于具有多输入的系统和多个输出(MIMO),因为用于表示系统的传递函数和微分方程变得过于复杂,并且当涉及一个输入(或输出)时变得过于复杂。其次,PID控制基于恒定参数,因此其在控制非线性系统方面的有效性是有限的。
替代控制方法是状态空间控制。PID控制(AKA“传输控制”)和状态空间控制之间的关键差异是状态空间方法考虑了系统的内部状态,通过被称为“状态变量”。这些状态变量描述了系统及其对任何给定输入集的响应。另一方面,PID控制依赖于“观察者”,该“观察者”估计系统的内部状态基于测量的输入和输出。
状态空间系统仅由两个方程表示。首先,状态方程给出了系统当前状态和输入到其未来状态之间的关系。输出方程为系统当前状态和输入到其输出之间的关系提供了关系。
对于线性时不变* (LTI)系统,状态方程和输出方程为:
x ' = Ax(t) + Bu(t)
y(t)= cx(t)+ du(t)
在哪里:
X是所有状态变量的向量
X '是状态向量的时间导数
U是输入向量
y是输出矢量
a是国家矩阵
b是输入矩阵
C是输出矩阵
d是馈送矩阵
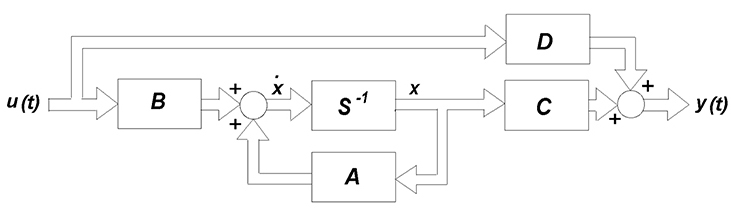
状态空间控制框图。
图片来源:wikipedia.org
*定常系统是指输出不依赖于输入发生的时间。相反,在时变系统中,输入的时间对输出有影响。时变系统的一个例子是分配系统,当它将液体分配到过程中时,系统的质量会发生变化。
状态空间控制通常被称为“现代”控制方法,因为它需要描述系统的时域的微分方程,并使用状态变量将它们分析在向量形式中。这使得可以通过简单的矩阵代数来评估系统,其还允许评估多输入的多输出系统。This is in contrast to “classical” control methods, such as PID, which rely on complex Laplace transforms and Fourier transforms to convert the system’s time domain representation – given as a complex set of differential equations – into the frequency domain – given as algebraic equations.
状态空间控制传递函数方法的主要优点是它适用于广泛的系统:线性和非线性;时变和时不变;单输入单输出(SISO)和多输入多输出(MIMO)。
提交:运动控制技巧那运动控制•电机控制




告诉我们你的想法!