

多转编码器的切角。
图片来源:A-Tech Instruments Ltd。
在运动控制中,通常有两种类型的定位,可用于线性轴或旋转轴:相对的,其中每个位置是基于前一个位置,而不管轴的实际位置;或绝对的,其中每个位置都指向一个主点或零点。
通常使用的是具有很长行程的轴,或具有“无穷”定位的轴,如转盘和输送机多圈绝对值编码器.多转设计可以跟踪编码器的位置在许多转-通常高达4096。(这与单圈编码器相反,单圈编码器在每次完整的编码器旋转后重置位置值。)但是,即使是使用多转编码器的绝对定位,如果应用程序超过编码器的最大转数,也会导致轴存在显著的定位误差。
在数学中,模操作求两数除后的余数。一个简单的例子:(9 mod 4)等于1,因为当9除以4,余数是1。
这就是模定位出现的原因。例如,一个带有16位多转绝对编码器的转盘(能够216,或4096转)安装到电机,并通过5:1齿轮比驱动。在这种配置中,每转一圈表需要5转电机和编码器。一旦编码器超过4096圈,就会发生溢出,编码器又开始从零开始计数。
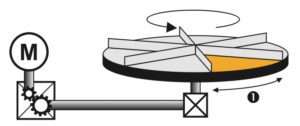
当多转编码器超过其最大转数时,模定位存储溢出,并确保不丢失位置信息。
图片来源:Lenze Automation GmbH
第一个动作需要4.8表转(4转+ 288度),意味着电机和编码器已经转了24转(4.8 * 5 = 24)。编码器存储这些信息,当系统断电或重新通电时,它能正确地识别位置。
下一步要大得多,表转825.6圈(825圈+ 216度),意味着电机和编码器转4128圈(825.6 * 5 = 4128)。由于编码器已经超过了其最大的4096转,发生溢出,编码器再次从零开始计数,只记录了32个电机/编码器转(4128 - 4096)。
当系统关闭然后再打开时,它只识别32电机/编码器转,或6.4表转(6转+ 144度),已经发生。额外的72度工作台运动(216 - 144 = 72),相当于一个完整的电机旋转(72 * 5 = 360),是缺失的。每次编码器超过其4096转限时,就会发生这种位置丢失。
请注意,如果编码器的最大匝数可以平均除以齿轮传动比,则不会发生溢出问题。例如,当齿轮传动比为8:1时,当与最大4096圈的多圈编码器一起使用时,不会造成位置丢失,因为8平分4096 (4096 ÷ 8 = 512)。
采用模定位,将发生的溢出存储在控制器中,防止了定位信息的丢失。或者,如果驱动器提供“模”功能,它可以启用跟踪和存储任何编码器溢出。模函数是直接使用的,要求用户输入模值(通常是360度),电机/编码器旋转和轴旋转(或直线旅行)之间的关系,以及编码器类型和分辨率。无论是基于控制器的还是基于驱动的模定位解决方案,都确保了溢出的原因,并相应地纠正了实际位置。
了下:运动控制技巧,编码器(旋转)+分解器,运动控制•电机控制




告诉我们你的想法!