

有两种主要类型的驱动因素步进电机,恒定电压驱动器(也称为L / R驱动器),以及恒定电流驱动器(也称为斩波器驱动器)。
步进电机运行的一个困难是电机绕组的时间常数(L/R)防止电流在脉冲期间迅速增加。这意味着,除非电压非常高,电流永远不能达到它的全额定值,特别是当脉冲率很高(即在高电机转速)。这个限制由两个方程决定:
欧姆法律:
![]()
地点:
I =当前
V =电压
R =阻力
电流上升与电感的关系:
![]()
地点:
dI/dt =电流上升时间
L =电感
为了高速获得高电流 - ,因此高扭矩 - 在高速时,电压需要尽可能高,电感尽可能低。但在传统的L / R驱动器中,电压必须保持低,以保持稳态电流变得过度。
L / R的值是时间常数,τ.e,这是目前达到63%所需的时间(1 - 1 / e)它的最终价值。
斩波器驱动器通过快速将输出电压转动到电机(AKA“斩波”)以控制电动机电流来解决高速从步进电机获得高扭矩的问题。在电动机的每个步骤中,将非常高的电压(通常高于电机标称电压的八倍)施加到电动机绕组。根据当前上升和电感之间的关系,这导致电流快速上升。根据欧姆的法律,它还允许生产更高的电流。
一个恒定的、固定的电压斩波频率——通常是20 kHz或更高(高于可听范围)——改变输出脉冲的宽度。绕组阻抗随电机转速的变化而变化,因此在更高的转速下(绕组中的阻抗更高),电压准时更长,这产生更大的脉冲宽度,允许电流建立到适当的水平。在较低的速度(较低的绕组阻抗),电压准时更短,给出较小的脉冲宽度。这种技术也被称为脉冲宽度调制(PWM)。
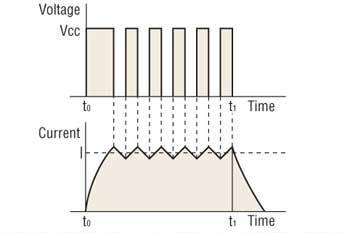
恒流(斩波器)驱动中电压和电流的关系。
图片信用:东方电机美国公司
斩波器驱动器中的电流由与每个绕组串联的电流传感电阻调节。随着电流的增加,电压通过电阻和A比较器监控此电压水平。在预定的参考电压下,输出电压被关闭(截断)直到下一个脉冲发生。通过这种方式,电流随着电压的断开和接通而建立和下降,从而产生适当的每个步骤周期的平均电流。这使得精确控制扭矩,而不管电源电压的变化。它还为当前的积累和衰退提供了尽可能短的时间。
尽管斩波器驱动器需要额外的电子器件来监视绕组中的电流并控制电压切换,但它允许步进电机在比传统的L / R驱动器更高的速度下产生更高的扭矩。
特写图片来源:Haydon Kerk Motion Solutions
了下:线性运动技巧,运动控制•电机控制,汽车•步进




告诉我们你的想法!