

惯性传感器用于将惯性力转换成可测量的电信号以测量物体的加速度,倾斜和振动。微机械线技术使得可以使用单晶硅传感器元件产生MEMS(微机电系统)惯性传感器。这些微米尺寸的传感器符合低成本,高性能,精度高,表格因素等所有主要系统设计驱动因素。基于与宏观惯性传感器的相同原理,MEMS惯性传感器可以使用像尺寸小的微米一样小的传感器单元的物体的位置,方向和加速度的丝毫变化,取向和加速度。
主要有两种类型的MEMS惯性传感器 - 加速度计测量一个或多个轴的线性加速度,以及测量角运动的陀螺仪。当每个应用需要具有不同带宽,分辨率和动态范围的惯性传感器时,这些传感器用于特定应用。例如,汽车安全气囊释放系统中使用的惯性传感器必须具有高达0.5kHz的带宽,分辨率约为500毫克,动态范围为约+/- 100g。虽然空间微沉降测量仪中使用的惯性传感器可以具有0-10 Hz的带宽,但必须具有精确为<1μg和动态范围小于+/- 1g的分辨率。
惯性传感器通常在任何应用或设备中的较大控制系统的一部分。仅仅是对象的加速或角度运动的信息无用。从惯性传感器收集的信息始终用于控制器件本身的运动,或者用于激活致动器,以便打开汽车的安全气囊。
惯性传感器的应用
曾经有一段时间,建造惯性传感器是一件昂贵的事情,它们的使用仅限于军事和航空航天应用。MEMS惯性传感器的发展为惯性传感器在汽车和各种消费电子领域的应用开辟了可能性。
在汽车工业中,加速度计用于安全气囊释放控制、牵引力控制、安全带控制、主动悬架、防抱死制动系统(ABS)和监测车辆振动。而陀螺仪用于侧翻保护,自动指示器,动力转向和控制车辆动力学。
在消费领域,惯性传感器被广泛应用于视频摄像机、虚拟现实耳机、电脑指向设备、智能玩具和游戏键盘等领域。现在所有的智能手机和平板电脑都有用于检测屏幕旋转、游戏和增强现实应用的惯性传感器。
惯性传感器还用于监控机器人操作手和无人机器人车辆的位置和方位。在医疗应用中,这些传感器用于监测特定情况的患者,如监测帕金森病患者。高端惯性传感器用于军事和航空航天应用,如智能弹药、飞机动力学控制、碰撞检测、飞机座椅弹射系统和微重力测量。
加速度计
加速度计由一个可以在一个或多个轴上测量加速度的机械传感元件组成。传感元件由一个通过机械悬架系统连接到参考系上的验证质量组成。在MEMS传感器中,证明质量是一个非常小的地震质量,悬挂系统是由硅弹簧建造的。

加速度计象限的顶视图显微照片
当传感器受到由于加速度而产生的惯性力时,证明质量从其稳定位置偏转。这是由牛顿第二运动定律决定的。证明质量对加速度的挠度用拉普拉斯方程表示如下:
x / = 1 / (s2+ b/m + s*k/m)
在那里,
X是证明质量的位移,
一个是加速度,
s是拉普拉斯算子,
B是阻尼系数,
M是证明质量的质量,
K是悬架系统的机械弹簧常数。
以下等式给出了传感器的谐振频率:
fN.=√(k / m)
下式为质量因子:
Q =√(m * k) / b
下式给出了传感器的灵敏度(开环):
s = m / k
然后,您可以看到,如果灵敏度增加,谐振频率会降低,反之亦然。可以使用闭环系统调整此权衡。阻尼系数决定了加速度计的最大带宽。在MEMS加速度计中,阻尼系数通常是可变的,并且随着检测质量的位移而增加。
在所有类型的微加工加速度计中,证明质量的位移是通过位置测量接口来测量的,就像在电容测量中,证明质量上有可移动的板,它们沿着证明质量在固定电容电极之间移动。在加速度计的设计中有许多类型的传感机构。常用的传感方法有压阻式、电容式、压电式、光学式和隧穿式。
加速度计可以有开环系统或闭环系统。如果直接使用位置测量接口的电信号作为输出信号,则称为开环加速度计。大多数加速度传感器都是开环的,因为它们很容易制造。然而,开环加速度计由于可变的弹簧常数、可变的阻尼系数和非线性的质量位移,必须管理高公差。
在闭环加速度计中,有一个反馈系统,将反馈力应用于与其加速度成比例的证明质量,使证明质量返回其静止位置。这样,非线性因素被抵消,灵敏度取决于可以使用电信号控制器精确地控制传感器的反馈控制和动态。通过静电,热或磁性致动可以将样品放回其静止位置。控制反馈力的反馈信号可以是模拟的或数字的。所有这些都会增加传感器设计的复杂性。
加速度传感方法
加速度计在特定轴上感知加速度的方式有很多。下面介绍一些加速度感知方法:
- 压阻式加速度计-在这些类型的加速度计,证明质量是附加到一个压敏电阻。电阻器连接读出电子电路。当证明质量中有位移时,压阻器的电阻与施加的力成正比。这些类型的加速度计是第一个看到批量生产。这些类型的加速度计的最大缺点是它们的热稳定性。由于热噪声的影响,抗压电阻会发生显著变化,并可能导致错误输出。

示例显示压阻式加速度计的工作原理
- 电容式加速度计-在电容式加速度计中,电容式感应手指附着在证明质量上,随着证明质量的位移沿着给定的轴移动。每个活动板被放置在两个电极之间。当存在加速度时,证明质量向与运动方向相反的方向位移,变板沿证明质量运动。变极板沿轴线位置的变化引起其与固定极板距离的变化,并引起电容的对称变化。然后,通过电子读出器将其测量为电子输出。电容式加速度计热稳定,但容易受到电磁干扰,由于寄生电容会产生错误输出。

电容式加速度计的工作原理示例
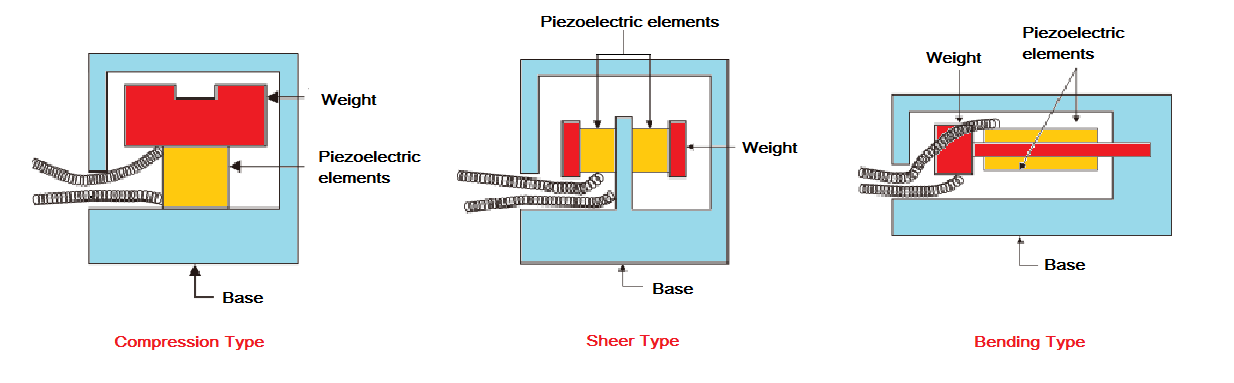
- 压电加速度计- 大多数宏观加速度计使用压电材料来检测检测质量的运动。许多微机加速度计也使用相同的原理。这些加速度计具有很大的带宽,但由于泄漏电流而具有极差的谐振频率。压电材料产生与给定轴上的样品的位移成比例的电信号。

举例说明压电加速度计的工作原理
- 隧道加速度计-这些类型的加速度计使用隧道电流来测量证明质量的位移。尖与电极之间的隧穿电流随尖电极距离呈指数变化。隧道电流公式如下:
我= I.0* exp(-ᵦ√(φz))

示例显示隧道加速度计的工作原理
在那里,
I是尖端和电极之间的隧道电流,
我0根据所使用的材料来调整电流,
ᵦ为转换系数,
φ是ev中的隧道屏障高度,
z是尖端电极距离。
- 共振加速度计-在共振加速计中,证明质量被附在谐振器上。证明质量的位移改变谐振器的应变,从而改变谐振器的谐振频率。频率的变化是使用频率计数器电路将频率转换为数字电信号。这些加速度计对噪声相当免疫,而且由于频率变化可以直接转换为数字格式,因此非常可靠。

举例说明谐振式加速度计的工作原理
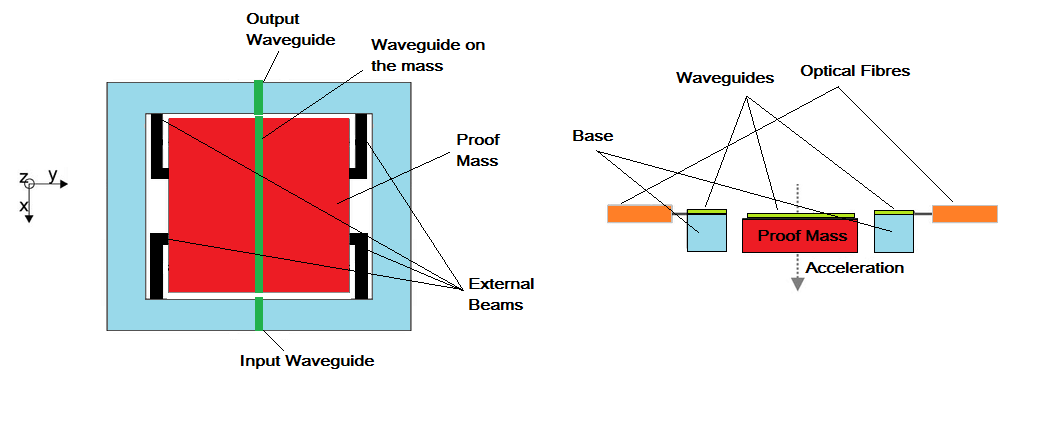
- 光学加速度计-这些加速度计使用光纤和波导连接到证明质量。然而,光纤型加速度计不适合批量制造,因为光纤需要手动安装在传感器组件的证明质量附近。另一种类型的光学加速度计使用LED和PIN光电探测器来测量证明质量的位移。光学加速度计的优点是不受静电和电磁干扰。但是,由于它们通常涉及到复杂的组装和读出电路,它们并不太受欢迎。

举例说明光学加速度计的工作原理
陀螺仪
陀螺仪测量物体的旋转。MEMS陀螺仪使用科氏力原理。当一个物体在一个旋转系统中运动时,它受到一个垂直于旋转轴和运动方向的力。这就是科氏力。MEMS陀螺仪由一个机械结构组成,该机械结构在科里奥利力的作用下产生共振,并在同一或一个二次结构中激发二次振荡。二次振荡与结构在给定轴上的旋转成正比。与驱动力相比,科氏力的振幅相对较小。这就是为什么,所有的MEMS陀螺仪都使用了一个振动结构,使用了科里奥利力现象。

举例说明MEMS陀螺仪的工作原理
振动结构由一组弹簧连接到内框的证明质量组成。内架通过另一组正交弹簧与外架相连。所述内框与外框之间沿正交弹簧连接有电容感应指。科里奥利力与旋转物体的角速度以及物体朝向或远离旋转轴的速度成正比。证明质量沿内弹簧连续地以正弦方式驱动。当系统发生旋转时,谐振证明质量沿内、外框架之间的正交弹簧产生科里奥利力。这改变了电容感应手指之间的距离,所以输出一个与科里奥利力成比例的电信号。由于科里奥利力与角速度成正比,由此产生的电信号也与系统的角速度成正比。
了下:传感器提示



