

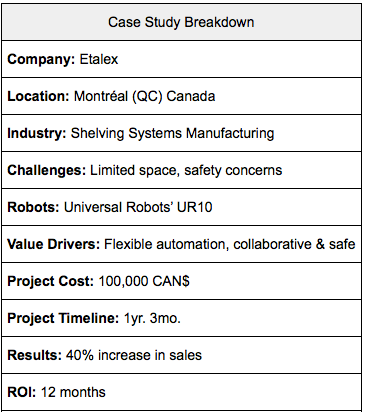
Etalex这家加拿大制造商生产商用内饰、金属固定装置、货架、木质家具和重型货架系统。该公司在从压刹车中取出金属部件时遇到了困难,导致了严重的自动化问题。
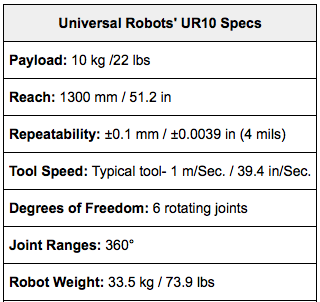
Etalex在媒体前没有安全守卫的空间,需要一个灵活的、用户友好的机器人,能够安全地在交通繁忙的区域处理拣选和放置任务。公司采用了通用的机器人UR10来修复这个问题。UR10是专为大型任务设计的,是通用机器人公司最大的协作机器人手臂。
挑战
“我们需要一个灵活的自动化解决方案,可以用于10个不同的生产周期。由于我只有6英尺的空间前制动压机,这是很重要的,我可以运行这个应用程序,没有安全笼子周围,”Etalex工厂工程师Jean Francois Rousseau说。
在Etalex的新机器人同事到来之前,一名员工每天要花8个小时手动卸载压力机制动器。手工任务现在已经减少到每天一个小时,用于检查每个托盘的质量和更换线圈,导致估计投资回报率约12个月。
Etalex机器操作员Richard Clive说UR10使工作场所100%安全。“以前,你必须把你的手靠近刹车压。任何时候都有发生事故的可能。但有了通用机器人,任何人都不可能受伤。”
 [相关内容:与环球机器人联合创始人Esben Østergaard的问答]
[相关内容:与环球机器人联合创始人Esben Østergaard的问答]
在安装UR10之前,Etalex获得了委员会(CSST)的批准,该委员会批准在工厂使用协作机器人。尽管风险评估认为机器人可以在没有安全保护的情况下运行,但卢梭决定安装一个区域传感器,一旦未知物体进入机器人的工作空间,该传感器会使机器人减速:
“严格来说,这并不是必需的,但让机器人减速至20%,对于刚刚习惯在无人看管的机器人下工作的员工来说,是令人放心的。”
解决方案
在30万平方英尺的Etalex生产大厅中,UR10位于右边,卸下金属部件到一个大型压刹车。在压力机在零件上打孔后,机械臂的气动吸盘将零件拾取回来,并将它们堆成有图案的一堆放在手推车上。当这种情况发生时,员工们在繁忙的大厅里在机器人面前来回走动。
与其他25个在Etalex运行的机器人相比,UR10的应用是一个不同寻常的景象。这种协作机器人内置了力控制,限制了接触时的力,不会造成身体伤害,使它们能够与员工一起工作。与传统工业机器人通常固定在一个地方不同,轻量级UR机器人还可以快速移动,并为各种生产任务重新编程。
UR机器人与其他笼子机器人的区别还在于易用性。编程发生在触摸屏平板电脑上,用户按下方向键让机器人移动到想要的位置。另一种选择是将机器人置于“教学模式”,这是Etalex程序员Alex Pichette广泛使用的功能。
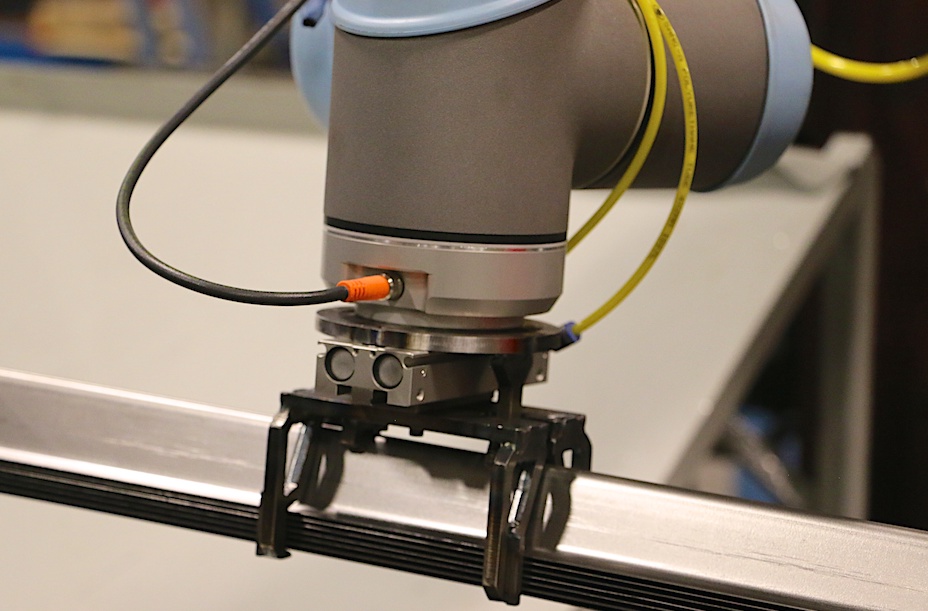
Etalex为UR10创建了一个抓取器,可以在同一个循环中处理七个部分,而不是一个。(来源:环球机器人)
“教学模式允许你简单地抓住机器人手臂,并向它展示要做什么动作。不用回到键盘输入新的数据,所有的编程都在机器人旁边的地板上进行。这节省了我们很多时间。”
 结果
结果
Etalex运营总监Jean Piuze解释说,公司60%的成本是用于购买金属支架的钢材。
“这意味着我们必须大幅优化生产,以保持竞争力并降低成本。利用机器人实现自动化是我们实现这一目标的唯一途径。”“结果,我们的销售额增长了40%,这也意味着我们不需要因为自动化而裁员。他们现在被解放出来,可以执行更有挑战性的任务,而不是简单的挑选和放置例行公事。”
Etalex目前正在研究新的机器人电池,另外两个UR10s用于码垛应用:一个用于镀锌货架,另一个用于货架加固通道。最初,卢梭并不认为UR机器人能够完成这些任务。
“这需要3秒的快速循环,但我们想出了一种方法,为UR机器人制造了一个抓取器,可以在同一周期内处理7个零件,而不是一个,这意味着我们可以轻松地将周期时间设定为20秒。”我们现在倾向于在任何可能的地方使用UR机器人。”

Etalex的Alex Pichette为公司的UR10码垛应用程序编程。(来源:通用机器人)
了下:机器人的报告




告诉我们你的想法!