

 当间歇性功率密度是一个要求很高的值时,使用经典的均方根计算和速度-扭矩性能曲线作为唯一的选择方法可能会有问题。这是因为这样的方法可能会导致电机或驱动器尺寸过小。
当间歇性功率密度是一个要求很高的值时,使用经典的均方根计算和速度-扭矩性能曲线作为唯一的选择方法可能会有问题。这是因为这样的方法可能会导致电机或驱动器尺寸过小。
通过赫尔利吉尔•高级应用和系统工程师|Kollmorgen
使用经典的性能曲线与RMS计算是完全可以接受的大多数伺服应用程序。然而,如果应用程序的间歇转矩相对于其电机的连续能力而言较大,则需要考虑所建议设置的热时间常数。紧凑或封闭的设计空间会加剧热问题。
这篇文章提供了一些可视化的图片,以帮助理解动态对伺服电机热时间常数的影响——特别是当应用程序需要长时间连续运行时。
伺服电机由于内部损耗而产生热量,每台电机耗散内部产生的热量的不同能力决定了其额定的连续容量…

显然,在机器设计规划阶段有许多因素需要解决。伺服电机和驱动器的选择会影响机构在所有条件下获得目标性能的成功机会,包括正常运行、e -stop和预见的潜在事件。电机的扭矩和电流能力,需要超过连续能力,以达到特定的目标,一段较长的时间;使用简化的图形化方法(本文后面的图B)可以帮助克服广泛风险管理决策的初始设计挑战。
传统的伺服电机应用有关各种速度要求,扭矩要求通过定义的运动配置文件输入和退出间歇性能。传统上,超出伺服电机的连续功能的峰值电流有助于电机满足加速度和减速要求。运动简档最常需要这些峰值电流短时间(通常在毫秒范围内)不超过驱动放大器可获得4至5秒的典型最大值。
在这些间歇性操作的常规情况下,通常不必选择具有满足应用峰扭矩要求的连续占空比的电动机。相反,我们只是:
- 用均方根(RMS)方程求出应用程序的有效连续转矩(Trms)和速度(Nrms)要求,然后…
- 确保这种等效的操作要求符合所选电机的连续(以及热)能力。
- 在验证所需要的峰值扭矩(Tpk_required)小于所选电机和驱动器所需转速下的可用峰值扭矩(Tpk_available)。
特殊应用条件
闭环运动控制技术扩展到较不常规的应用中,通常会导致特定的要求或操作条件超过普通间歇性操作。然而,即使是常规应用有时也存在特殊条件。

例如,设计可能规定,在紧急停止(E-stop)的情况下,所有控制运动必须在拆除电源之前和特定的时间内停止。对于大多数应用来说,这通常不是一个问题……但对于具有显著动能的大型机器,使轴的运动停止所需的时间很容易超过配对电机驱动组合(Ic(drive)约等于Ic(motor))的最大4- 5秒可用峰值电流。
这一要求,虽然一般不要求更大的电机,通常需要更高的连续电流驱动器,以确保所需的峰值电流(Ipk_required)在E-stop减速可用。对于大型机器,在20到40秒时间范围内的e -stop要求是很常见的。
今天的许多脉冲宽度调制(PWM)驱动器都设计了折叠过载电路或使用铜线圈(TCT_coil)的热时间常数的算法-无论电流被折叠回驱动器或电机的连续电流。但为了满足这些非典型的伺服应用,典型的成对电机驱动组合,否则将被选择是不令人满意的。

对于一些大型机器(比如这个用于打印的机器),20_seconds到40_seconds的E-stops通常是可以接受的。
许多今天的伺服电机应用程序具有在伺服电机尺寸和选择期间需要解决的操作条件和潜在事件。考虑一些其他例子:
- 可能存在垂直轴要求 - 需要一种能够将负载保持在静态制动器的特定时间的连续能力大于其连续能力的伺服电动机。(这与通常不希望通过在正常生产周期期间通过接合和脱离来循环静态举起制动器的特别相关。)
- 可能存在轴要求,这需要动作系统,其能够处理不希望的事件,其中负载被卡住或以其他方式阻碍运动。这里,电动机必须能够在命令移动的完整持续时间(即使在不正确运行时)幸存下来。
无论是简单还是无法取代电机一旦安装(在正常的环境中,在空间或水下,或者在一个区域暴露在辐射)总是最佳选择伺服电动组合,最大限度地减少失败的风险,由于非典型事件或正常操作要求这反过来又能最大限度地提高可靠性和安全性。
过载和功率损耗的影响
根据要求的复杂性,许多应用程序需要扭矩(因此电流)高于电机的连续能力(Ic或I_rated)在应用程序所需的rpm(如Npk, Nrms)。因此,必须考虑电机功率损失的潜在限制或控制,以便电机能够执行必要的工作或特定的事件,同时电机的绝缘系统免受热过载的保护。
At this juncture, the motor’s demanded current (I_actual) is greater than the motor’s continuous rated current (Ic) capability for a significant enough period of time relative to the motor’s overall thermal time constant (TCT_motor), that the TCT_motor becomes dominated by the TCT_coil due to the relative heat transfer rates between the used non-homogeneous materials. For these specific cases or events under evaluation, the previously referenced RMS calculations over a given motion profile are usually invalid, though still calculated to ensure overall product selection requirements; because events needing overload situations can differ greatly from one application to the next.
为了满足潜在的事件或条件,需要峰值电流(I_actual)在限定的时间内提供峰值扭矩(Tpk),我们还需要确定电机的绕组/线圈能否在不造成电机绝缘损坏的情况下维持所需的过载电流。
电机绝缘的有效寿命(基于其连续额定值)每超过其连续额定值10°C,电机绝缘的有效寿命就会减半。
我们可以估计从电机线圈/绕组冷启动(环境)到额定极限温度(t_极限)的时间:
t_ultimate = - tct_coil (mounted) x ln[1-(W_loss(rated)/W_loss(actual))]
或者
t_ult。= - tct_winding x ln[1-(Ic .2/ I_actual2)]
其中W_loss(额定)被Ic2或I_rated2
和W_loss(实际的):I_actual2
注意,在这些条件下,I_actual大于电机的Ic(伺服电机在低转速或失速转速下的连续额定电流)。更重要的是,在这种情况下,实际的W_loss将继续超过额定值-潜在的热失控,如果有一个延迟的功率移除。
电机热的公式假设
当然,上面的替换(用适当的I2对于瓦特在分子和分母)假设恒定的功率耗散与恒定的应用[阶跃输入]电流。这个值——由于绕组的实际温度从环境温度(例如Rm(25°C))上升到基于W_loss(实际)的目标温度——是不正确的。然而,该值提供了一种保守的方法,以Rm(hot)为常数,用于求解动态非线性微分方程。更重要的是,在实际应用中,需要根据Irms值从非环境温度启动电机,对公式进行进一步的操作。
然而,无论是否操纵等式,预制的计算往往会在需要时仅在一个或两个点处完成。不幸的是,这意味着经常错过实际电流(i_actual)超出连续能力(IC)的实质性效果。
因此,在本文中,我们在图A中展示了一个图来展示所需的WATTS_LOSS超出设计的连续能力的影响。该曲线也让我们以评估的特定条件以图形方式确定相对(如果没有有效)TCT。反过来提供了一种方法来克服这种比率:i_actual(在评估)/ IC(连续电流)大于1的方面挑战,并且已知用于生产所需扭矩(T_required)。
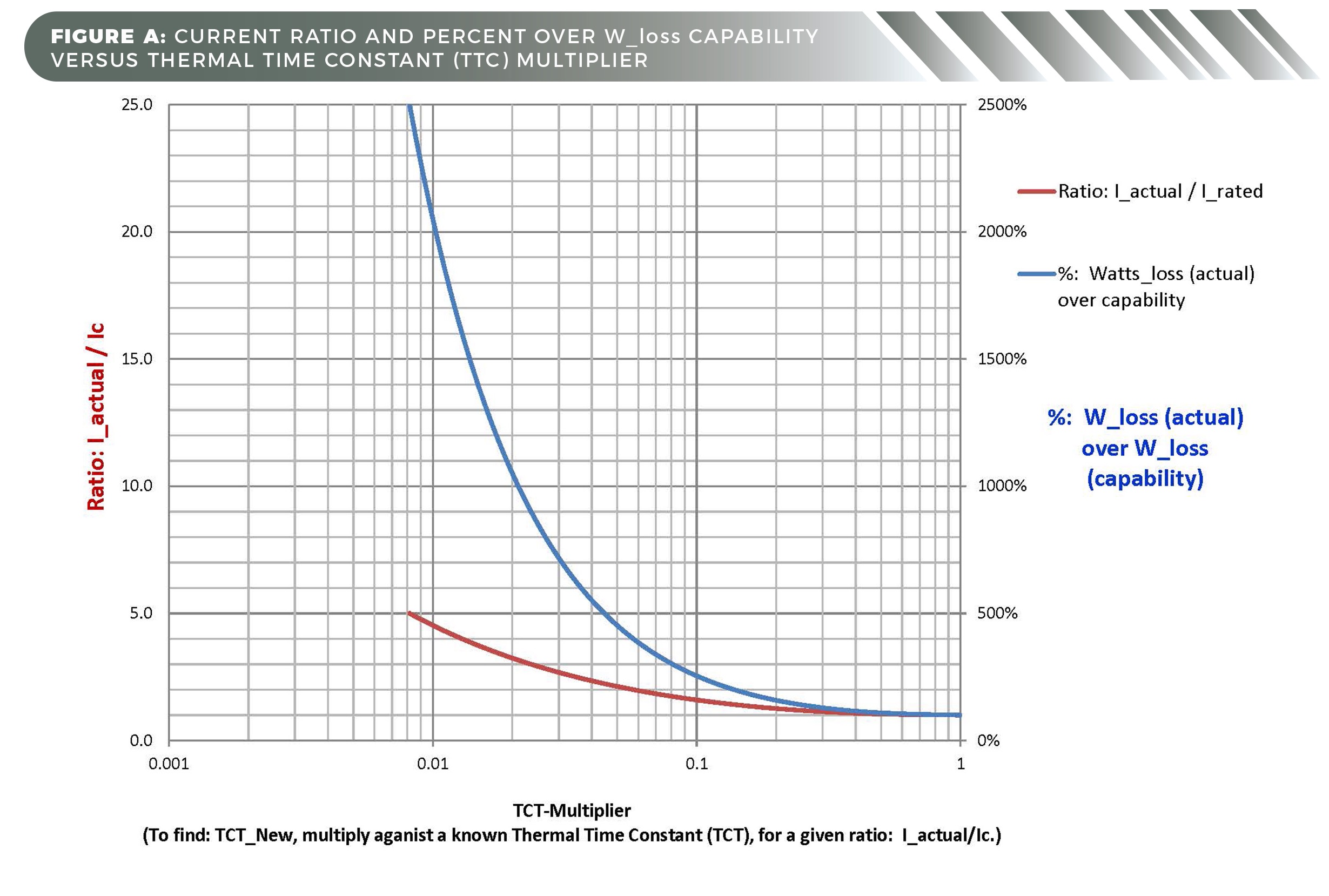
图A -这里显示的是当I_actual增加到Ic以外时热时间常数(TCT)的影响。点击放大。
本文还让我们使用图B来比较在特定条件下有效的TCT_motor和TCT_coil(air)。
今天的大多数伺服电机在电机绕组、层压和机架之间具有优良的导热性,特别是在环氧树脂封装的电机中。也就是说,这些非均质材料的传热能力仍然有很大的不同。
然而,在主题条件下,电机安装线圈的热时间常数(TCT_COIL(安装))是主导因素。此外,TCT_COIL(空气)可能太保守能够合理使用,因为它从磁铁线的特定质量计算而不考虑其安装在电动机框架内。
TCT_COIL(安装的)值(由此鉴定为TCT_WINDING)代表了热非均匀机动材料的第一级材料接触 - 更具体地,在线圈和环氧树脂和空气和叠片之间的界面处。
Because I_actual (under evaluation) > Ic, the published TCTs [coil(air), winding (coil mounted), and motor] are no longer constant as when I_actual <= Ic, the thermal time constant under consideration is dynamically changing with the motor’s actual watts loss (W_loss(actual)). For example, when the actual current (under evaluation) is <= Ic, the published TCTs for a given servo motor may have a relative range of TCT_coil(air) = 25_seconds, TCT_winding = 60_seconds, and TCT_motor = 600_seconds; however, when I_actual > Ic the effective TCTs will be significantly reduced from those published as a function: W_loss(actual) verses W_loss(rated).
过载对热时间常数(TCT)的影响
图A显示了在特定条件下,由W_loss(实际)/ W_loss(额定)的百分比得出的I_actual大于Ic(电机)的显著性——两者都与计算出的热时间常数(TCT)乘法器相对照。例如,一个I_actual = 5xIc要求绕组耗散比其额定连续能力多2500%(25倍)瓦。
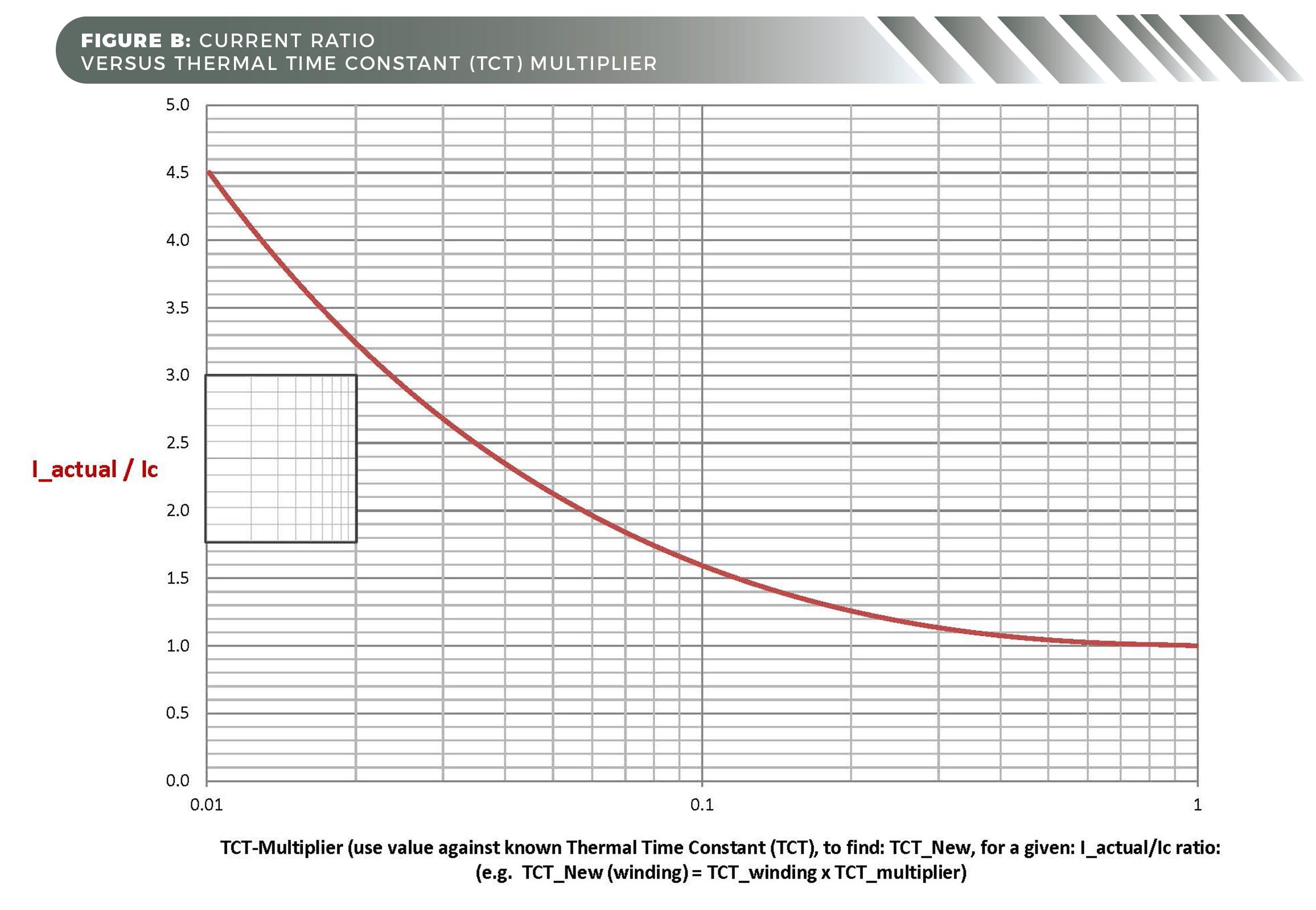
图B -这里显示的是I_actual(从略大于Ic到4.5Ic)的热时间常数(TCT)倍增器。点击放大。
图B让我们以图形方式确定特定的TCT和特定情况下达到极限温度的时间。这是通过应用图的x轴对应(TCT)乘数作为所需的I_actual与已知TCT的函数,并将结果乘以5,以达到最终温度的时间。说明:
问题一:不管驱动器提供电流的能力如何,我们的电机能否在环境温度为25°C的情况下,处理20秒的峰值电流= 3xIc ?假设我们使用的是最初建议的电机,应用程序的正常运行刺激一个TCT_winding = TCT_coil(mounted) = 60_seconds。
回答一:使用图B,我们只需要在左侧的垂直比例为3 (3xIc),水平移动直到与曲线相交。然后在半对数尺度上读取相应的x轴乘法器,并将其值应用于公布的TCT_winding。因此,在3Ic处,有效TCT_winding(3Ic) = 0.023 x 60 = ~1.38_sec。
注意,95%的热升温将在3倍(热时间常数)或〜4.14_sec [3×1.38_sec。],其中5xtct = 99.3%的上升或6.9_sec(总时间额定绕组温度的总时间)。
因此,对于这个应用程序,我们需要选择一个更大的电机或带有较长的TCT_winding的电机…或改变应用程序要求。
顺便提一下,用计算t_ ultimate = - tct_winding x ln[1-(Ic/I_actual)2]的公式;T_ ulimate = -60_sec。x ln [1-(1 /3)2] = 7.06_seconds…
问题二:因为问题1的目标电机3Ic不可能持续30秒,我们可以使用2Ic Ipk持续20秒吗?
答案二:同样,使用图B, 2Ic的交点在x轴对数尺度上约为0.057。因此,在2Ic时,有效TCT_winding(2Ic) = 0.057 x 60 = ~3.42_sec。知道5 × TCT = 99.3%的温升是~17.1_sec,仍然低于建议的规范:20_seconds。
因此,即使有这个改变的规格:2Ic为20秒,我们将需要选择一个更大的电机或一个更长的TCT_winding或再次改变规格的条件下考虑。
注:Ic的倍数越小,在电机的总热时间常数(TCT_motor)中,物理上占主导地位的tct_绕组就越小。当I_actual/Ic接近统一(1),电机的其他热非均匀材料(如铝外壳,例如)发挥作用。
总之,本文说明了I_Actual / IC过载条件的严重性。如果i_actual / IC很高,则可以相当准确地估计TCT_winding(新)或由于非均匀材料而迅速转移热量以维持TCT_MOTOR的优势而估计最终温度。
然而,当比值:I_actual/Ic接近1时,热力学响应有两个指数函数——每个函数都有自己的时间常数(TCT_winding和TCT_motor)。由于材料的非均质性,混合了不同的热时间常数,这超出了本文的范围(通常需要进一步的评估和理解)。
Kollmorgen |www.kollmorgen.com.
赫尔利·吉尔是哈佛大学的高级应用和系统工程师Kollmorgen他于1978年毕业于弗吉尼亚理工大学工程专业,自1980年以来一直从事运动控制行业。可以和他联系hurley.gill@kollmorgen.com..
自1916年成立以来,Kollmorgen的创新解决方案为生活带来了大的想法,使世界更安全,改善人民的生活。如今,其世界级的运动系统和组件知识,行业领先的品质以及链接和整合标准产品和定制产品的深度专业知识不断提供性能,可靠性和易用性无与伦比的突破性运动解决方案。这为世界提供了机器建设者,这是一个不可维修的市场优势,为客户提供安心。有关更多信息,请访问Kollmorgen.com,电子邮件support@kollmorgen.com或打电话(540)633-3545.
了下:运动控制技巧



告诉我们你的想法!