

高龄者记得高年级学校集中学习3Rs:阅读、'riting'和'ritict传感器世界中还有3Rs:重复性、分辨率和响应性和传感器参数一样重要, 用户脑中常有混淆, 即他们到底指什么, 以及他们往往以什么方式交互
可重复性度量传感器测量系统输出对常态环境相同机械输入重复测试的变异性常用做法是使用至少3次重复输入,但5或更多相同输入被视为确定此参数的更好样本
可重复性通常通过平均过程评价多试时所观察到输出值的变异通常用全尺度输出或全span输出百分比表示,但有时用绝对值表示,如百万分数或机械件分数适用于实际传感器测量
可重复性测量的一个约束点是试验输入必须以同样方式应用,通常从低值到高值消除歇斯底里的任何效果Hysteresis错误度量系统输出差值,当机械输入从低值上升到期望输入值时,则从高输入值下降至期望值多数无触位置传感器歇斯底里误差小于可重复性误差
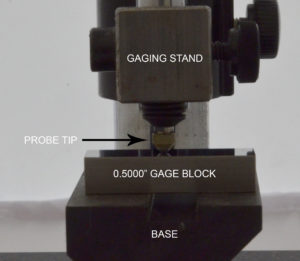
图1
图1显示可重复性实例,图1显示用0.5000-in精确格块校准的典型格子站中弹载定位传感器维度传感器输出0至10伏特DC全尺度0至1.传感器端向内移,允许Gage块插插到端向平基间,然后放行与块接触5试验系统输出数为:5.00125.00165.00135.000和5.0015Volts平均值略高于5.0013伏特,最大差为+0.0003伏特,等于FSO+30ppm或0.003%FSO
分辨率度量输入传感器测量系统最小变化似似相当简单概念,但受传感器自身外部因素影响,其中最重要的是系统模拟输出信号对噪比系统输出电噪通过掩码传感器输出小小变化可减少系统有效分辨率举例说,如果传感器分辨率规范为0.25mV,系统输出噪声和波纹为2mvp-p,清晰传感器输出变换小于2mV在该噪声中无法识别系统实际解析量仅为传感器解析规范提供量的12%
相似可重复性,分辨率常指全缩放/Fullspan输出百分比,但也可用绝对值表示,像实际传感器测量单元分数一样,或用数字放大测量比特数,这只是分量2表达法,计算机中发现10比特解析程序为1024分解程序210分解程序1分解程序4096分解程序212分解程序212分解程序2
响应表示传感器测量系统在动态输入条件下的性能,即系统机械输入快速变化特别重要的是认识到响应是一个测量系统参数,而不仅仅是传感器参数或规范
在实践中,有几种方法描述响应特征,通常是基于系统是一阶系统还是二阶系统传统模拟系统使用bode图显示频率响应和相位延迟重复输入步函数响应3倍系统时常量典型度量动态性能数字采样系统对数比特更新率是首选响应度量不论选择如何具体说明响应,最终目的是理解测量系统在系统输出变换变换前能对变换输入作出何等好响应而不失真、不可使用或不稳定
从上述定义中很容易看出系统可重复性很容易受系统解决的影响。如果测量系统分辨率不足,很可能成为优异测量系统可重复性的重大约束因素在实践中传感器重复性可能极佳,但测量系统重复性不能比系统分辨率允许强
测量系统重复性与分辨率交互性很容易理解,而分辨率和响应性交互性则不那么简单明了。当系统机械输入快速变化时,分辨率对系统输出的影响通常被系统因系统动态响应限制而下降的较大效果遮掩机械输入定位测量系统缓慢或间歇变化, 特别以杂交方式变化, 则悬浮效果(静态摩擦)开始作用
定位测量系统测值效果通常可以是非线性并往往不易重复性,因此确定或定性系统解析可能更加复杂化,甚至有可能。系统分辨率与系统可重复性交互作用,如上所述,测量误差可大幅增加,特别是当系统为闭路控制提供定位反馈时。传感器输出中的非线性数字线性化技术抵消非线性效果不切实际
正因如此,努力减少悬浮通常是必要的,以尽量减少因悬浮在极慢移动或间歇定位系统造成的误差这些努力可能涉及应用技术,如二维度低振荡信号高频输入系统替换动模摩擦,或通过改善传感器表面并加润滑油减少传感器移动面摩擦
联盟传感器集团
alliancesensors.com
文件基础:传感器提示




告诉我们你的想法