

Researchers from North Carolina State University and Elon University have developed a technique that allows them to remotely control the movement of soft robots, lock them into position for as long as needed, and later reconfigure the robots into new shapes. The technique relies on light and magnetic fields.
“We’re particularly excited about the reconfigurability,” said Joe Tracy, a professor of materials science and engineering atNC状态and corresponding author of a paper on the work. “By engineering the properties of the material, we can control the soft robot’s movement remotely; we can get it to hold a given shape; we can then return the robot to its original shape or further modify its movement; and we can do this repeatedly. All of those things are valuable, in terms of this technology’s utility in biomedical or aerospace applications.”
LEDs make soft robots pliable
For this work, the researchers used soft robots made of a polymer embedded with magnetic iron microparticles. Under normal conditions, the material is relatively stiff and holds its shape.
However, researchers can heat up the material using light from a light-emitting diode (LED), which makes the polymer pliable. Once pliable, researchers demonstrated that they could control the shape of the robot remotely by applying a magnetic field. After forming the desired shape, researchers could remove the LED light, allowing the robot to resume its original stiffness — effectively locking the shape in place.
通过第二次施加光并卸下磁场,研究人员可以使软机器人返回其原始形状。或者他们可以再次应用光线并操纵磁场以移动机器人或让它们假设新形状。
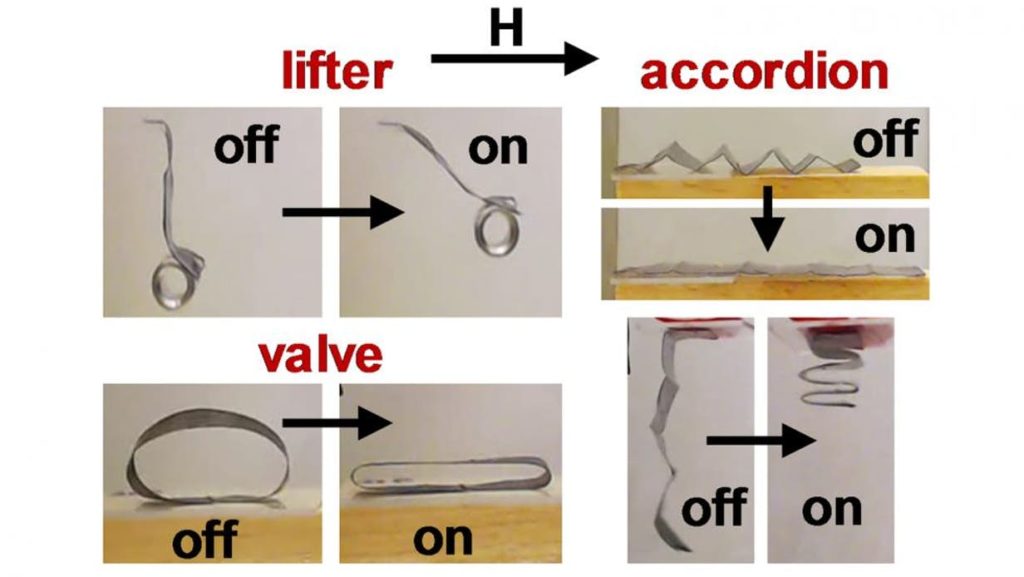
在实验测试中,研究人员证明,软机器人可用于形成“抓钉”来提起和运输物体。软机器人也可以用作悬臂,也可以用弯曲不同方向的花瓣折叠成“花”。
“我们不仅限于二进制配置,例如开放式或关闭的抓刀,”该论文的第一作者杰西卡·刘(Jessica Liu)说。北卡罗来纳州的学生。“我们可以控制光线,以确保机器人在任何时候都能保持其形状。”
铁微粒可用于使软机器人移动。资料来源:北卡罗来纳州立大学
简化机器人设计
此外,研究人员开发了一种计算模型,可用于简化软机器人设计过程。该模型使他们可以微调机器人的形状,聚合物厚度,聚合物中的铁微粒的丰度以及所需磁场的大小和方向,然后再构造原型以完成特定任务。
“Next steps include optimizing the polymer for different applications,” Tracy said. “For example, engineering polymers that respond at different temperatures in order to meet the needs of specific applications.”
作者和支持
The paper, “Photothermally and Magnetically Controlled Reconfiguration of Polymer Composites for Soft Robotics,” appears in the journalScience Advances。此外,刘(Liu)作为第一作者,由北卡罗来纳州州立大学的本科生乔纳森·吉伦(Jonathan Gillen)合着;Sumeet Mishra,曾任博士学位北卡罗来纳州的学生;埃隆大学物理学副教授本杰明·埃文斯(Benjamin Evans)。
的工作是在国家的支持下完成的cience Foundation (NSF) under grants CMMI-1663416 and CMMI-1662641. The work was also supported by the Research Triangle MRSEC, which is funded by NSF under grant DMR-1121107; and by NC State’s Analytical Instrumentation Facility and the Duke University Shared Materials Instrumentation Facility, which are supported by the State of North Carolina and NSF grant ECCS-1542015.
提交以下:学生课程,,,,机器人报告,,,,机器人技术•机器人抓手•最终效应器




告诉我们你的想法!