

当我们想到刚度时,我们经常会想到机械僵硬 - 零件或系统抵抗偏转的能力。但在伺服驱动的运动系统中,刚度也可以指该系统的调整方式 - 即伺服控制器中的增益是如何设置的,相应地,电机如何响应外部干扰。
机械僵硬
系统是机械僵硬经受负载时抗蚀剂变形。换句话说,它们可以承受高力或弯曲时刻,而不会改变它们的形状或位置。(请注意,机械刚度的相反是遵守。)部分的机械刚度取决于其弹性模量及其平面惯性矩,这由物体的尺寸和形状决定。
结构的机械刚度取决于其尺寸,形状和材料。
图片信用:wikipedia.org
在运动系统中 - 例如自动化或装配设备 - 机械刚度的最显着影响来自电动机和负载之间的连接点,包括齿轮箱,驱动机构(带和滑轮,螺钉等)和联轴器。这是直接驱动器的原因之一(线性电机和扭矩电机)表现出高刚度 - 因为负载直接耦合到电动机,消除了任何中间动力传递部件。
理论上,运动系统不能机械地太僵硬。具有低顺应性和高刚度的系统更有效地传输功率,并且优于具有低刚度的系统的响应性更好。但在现实世界应用中,机械僵硬必须与之平衡减震避免在整个系统中传输冲击载荷和振动的元素。
伺服僵硬
在伺服系统调谐时,刚度 - 通常被称为“伺服刚度”或“控制刚度” - 指系统的能力拒绝或克服外部干扰。当轴在轴跟随位置或速度轨迹时,这些可以是静态状态以静态状态发生的干扰。
伺服刚度由控制回路中的增益决定。在运动控制系统中,它是位置环的比例增益,对伺服刚度最大的影响。回想一下比例增益与正在校正的错误成正比并确定恢复力的量电机将产生以对抗干扰。
具有比例增益的轴设置得太低不能克服扰动(这有时在系统中被称为“柔软度”),但如果比例增益太高,系统将倾向于过冲并围绕目标振荡,导致不稳定。
如果包括速度控制环路,则速度循环的积分增益(k一世)也影响伺服僵硬度。
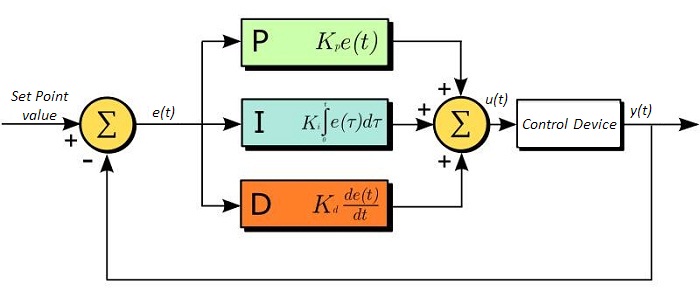
伺服刚度主要由位置环的比例增益决定(kP.)。但是,如果控制中包含速度循环,则速度循环的积分增益(k一世)也可以影响刚度。
图片信用:Thorlabs,Inc。
之间的关系机械的僵硬和伺服僵硬是谐振。与伺服系统操作的频率(带宽)相比,机械地硬度的系统往往具有高谐振频率。因此,具有高刚度的机械系统可以受益于硬伺服调谐(高收益) - 具有良好的反应,低振荡和快速设定时间。
另一方面,柔顺的机械系统(具有低刚度)的机械系统以较低的谐振频率运行。如果使用高伺服增益(高带宽)操作机械兼容的系统,则伺服带宽可以接近或重叠机械谐振频率并导致系统变得不稳定。
提交:运动控制提示



