

剑桥,质量。 - 阿姆斯特丹市设想了一个自治船队舰队巡航其许多运河的未来,以运送货物和人员,收集垃圾或自组装成浮动阶段和桥梁。为了进一步愿景,马萨诸塞州理工学院的研究人员对他们的机器人船的舰队赋予了新的能力,让他们互相瞄准并互相互相并继续尝试他们失败。麻省理工学院项目正在进行中。
大约四分之一的阿姆斯特丹表面积是水,有165个运河绕行繁忙的城市街道。几年前,麻省理工学院和阿姆斯特丹先进大都会解决方案研究所(AMS学院)在“罗缎“ 项目。这个想法是建立一个自主机器人船的队伍 - 配备传感器,推进器,微控制器,GPS模块,摄像机和其他硬件的矩形船体 - 在水中提供智能流动,以缓解城市繁忙的街道的拥堵。
项目的目标之一是创建在水道上提供按需运输的Roboat单位。另一个目标是使用Roboat单元自动形成“弹出”结构,例如脚桥,性能阶段,甚至食品市场。然后,结构可以自动拆卸在设定时间和改革中,以进行不同的活动。
此外,Roboat单元可以用作敏捷传感器,以收集城市基础设施的数据,以及空中和水质等。
2016年,麻省理工学院研究人员测试一个Roboat原型,围绕阿姆斯特丹的运河巡航,沿着预编程路径向前移动,向后和横向移动。去年,研究人员设计低成本,3-D印刷,船只的一季度刻度版本,更高效和敏捷,并配备了先进的轨迹跟踪算法。
机器人抓住对接站
在一篇论文在国际机器人及自动化会议(ICRA.),研究人员描述了现在可以识别并连接到对接站的机器人单元。
控制算法将Roboat引导到目标,在那里它们自动连接到具有毫米精度的定制锁定机构。此外,Roboat如果错过了连接,备份并再次尝试。
研究人员在麻省理工学院和查尔斯河的游泳池中测试了锁定技术,水域令人难以置信。在这两个实例中,Roboat单位通常能够在大约10秒内成功连接,从大约1米之后开始,或者在几次失败的尝试后成功。
在阿姆斯特丹,该系统对夜间垃圾收集尤其有用。机器人可以绕着运河航行,找到并固定在装有垃圾容器的平台上,然后把它们拖回收集设施。
“在阿姆斯特丹,运河曾被用于运输,其他事情现在用于交通。运河附近的道路现在非常拥挤 - 有噪音和污染 - 所以这座城市想要增加更多的功能回到运河,“城市研究和规划部门(Dusp)和A的研究生赛学员研究员在麻省理工学院感官城市实验室。“自动驾驶技术可以节省时间,成本和能源,并改善城市前进。”
“目的是利用Roboat单位为水面上的生活带来新功能,”计算机科学和人工智能实验室主任(CONT)的共同作者Daniela Rus(CSAIL的)和Andrew和Erna Viterbi电气工程和计算机科学教授。“新的锁存机制对于创建弹出结构非常重要。Roboat不需要锁定自动运输在水上,但您需要锁定以创建任何结构,无论是移动还是固定。“
在论文中加入Mateos是:魏王,CSAIL和Sycerable City Lab的联合邮编;Banti Gheneti是电气工程系和计算机科学系的研究生;Fabio Duarte,Dusp和Iscerable City Lab研究科学家;和Carlo Ratti,Iscerable City Lab的主任以及Dusp练习的主要调查员和教授。
使连接
每个Roboat都配备了锁定机构,包括球和插座部件,在其前部,背部和侧面上。球形部件类似于羽毛球羽毛球 - 锥形,橡胶体,最后是金属球。插座组件是宽漏斗,其将球部件引导到受体中。
在漏斗内部,激光束像一个安全系统一样,当球交叉进入受体时检测到安全系统。这激活了一个带有三个臂的机制,它关闭并捕获球,同时还向连接完成的Roboat发送反馈信号。
在软件方面,这些机器人使用定制的计算机视觉和控制技术运行。每个机器人都有激光雷达系统和摄像头,所以它们可以在运河周围从一个点移动到另一个点。每个对接站(通常是一个静止的机器人)都有一张纸,上面印着一个名为AprilTag的增强现实标签,类似于简化的二维码。AprilTags通常用于机器人应用,它使机器人能够检测和计算其相对于标签的精确三维位置和方向。
AprilTags和摄像头都位于机器人中心的相同位置。当一个移动的机器人离静止的AprilTag大约有一到两米远时,机器人就会计算自己在标签上的位置和方向。通常情况下,这将生成船舶运动的3-D地图,包括横摇、俯仰和偏航(左右)。
但算法去掉了除了偏航以外的所有东西。这产生了一个易于计算的二维平面,测量机器人摄像头的距离和标签的左右距离。利用这些信息,机器人将自己导向标签。通过保持摄像头和标签完全对齐,机器人能够精确地连接。
漏斗可以补偿机器人的俯仰(上下摇摆)和升沉(垂直上下)中的任何偏差,因为管道波相对较小。然而,如果机器人超出了它的计算距离,并且没有收到激光束的反馈信号,它就知道它错过了。
“在挑战的水域中,有时,目前的一季度规模的Roboat单位不够强大,无法克服风阵风或沉重的水流,”Mateos说。“Roboat上的逻辑组件说,”你错过了,所以备份,重新计算你的位置,然后再试一次。'“
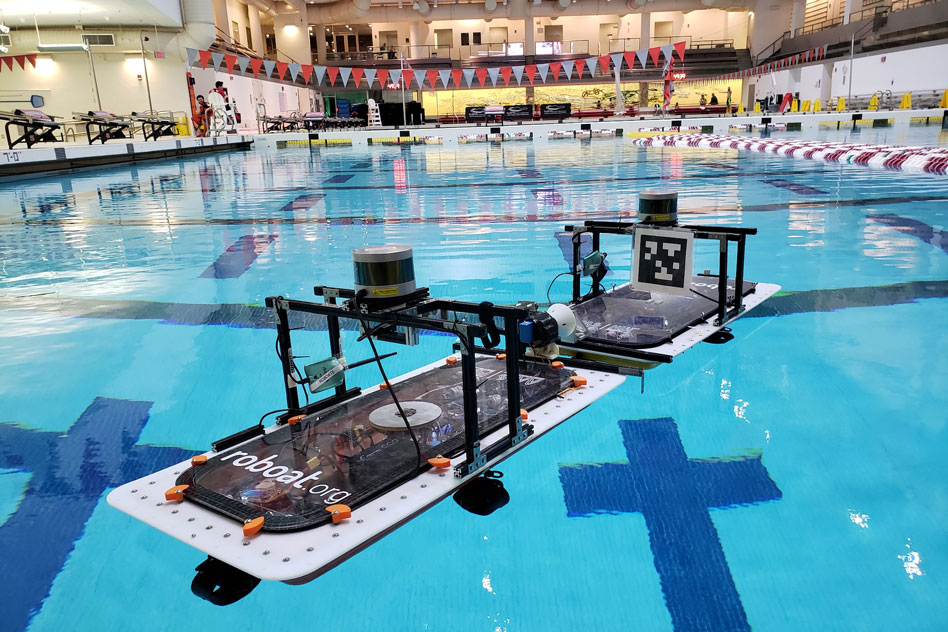
麻省理工学院的研究人员让他们的自主“机器人”舰队能够自动找到彼此并尝试连接。
未来的迭代
研究人员现在正在使用电流迭代尺寸的大约四倍的roboat单位,因此它们在水上更稳定。Mateos也在融合到漏斗的更新,包括诸如触摸橡胶夹具的齿轮状橡胶夹具,围绕销钉拧紧 - 就像灰色抓住其猎物。这可能有助于给Roboat单位更加控制,说明他们通过窄管牵引平台或其他roboat。
在作品中也是一个系统,该系统在LCD监视器上显示APRIGGA,该监视器将代码改变为信号以给定顺序组装多个Roboat单元。起初,所有Roboat单位都将被赋予一个代码,以保持一米。然后,代码更改为指示第一个Roboat到锁存器。之后,屏幕切换代码以使下一个Roboat锁存,等等。
“这就像电话游戏。更改代码一次将消息传递给一个Roboat,并且该消息告诉他们该怎么做,“Mateos说。
该研究由AMS学院和阿姆斯特丹市资助。
提交:学生计划那AI•机器学习那机器人的报告




告诉我们你的想法!