

在这个两部分的系列中,我们将回顾可重复性类型的基本定义及其在线性运动和驱动应用中的应用。第1部分介绍了单向重复性。
有效地自动化任何涉及运动的工业操作、测试程序或原型过程,都需要确定产生可接受结果所需的运动精度。
一个运动系统理想地定位到一个给定的目标点,具有少量的公差或不确定性。然而,运动系统的性能是由许多影响性能的因素决定的。
重复性、定位精度和分辨率主要决定精度。理解这些参数、它们的原因及其对系统性能的影响对于确定给定应用程序所需的能力和指定适当的运动组件是至关重要的。
观察可重复性的一种方法是定位器返回到特定位置的公差。单向重复性定义了仅从目标一侧入路的性能。双向可重复性定义了从目标的任意一侧入路的性能。
影响重复性的因素包括系统摩擦、扭转刚度、负载、加速度和回隙。
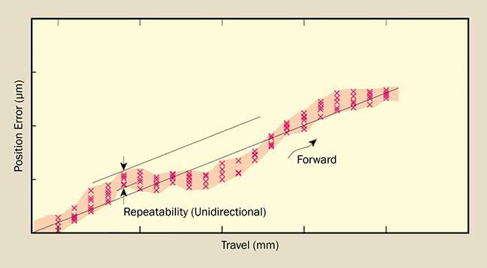
位置误差随行程范围的变化曲线定义了单向重复性。
可重复性是系统性能的最基本标准,它定义了一系列移动的结果的变化,或者更详细地说,定义了大量定位试验的均值离散的宽度。重复性是一种统计性质,通常用与若干标准差对应的散布宽度来定义正态分布。
通常,规定了三标准偏差重复性(3西格玛)。例如,考虑一个重复性规格为0.0001英寸的定位系统。对于3西格玛规范,任何一系列相同的运动都将落在0.0001 in的分散宽度内。有99.74的信心。通过比较,2 σ等于95.44置信区间,而6 σ对应99.9997置信区间。通常,运动系统只需要证明一致性或最小的可变性,以提供结果产品的一致性。在这种情况下,可重复性是满足精度要求的唯一必要属性。
单向重复性涉及到仅从一侧接近目标位置。它受到非恒定的静摩擦(称为粘着)和传动系统中的扭转刚度程度的影响。当力被应用到初始运动时,黏滞产生了以分离跳跃为特征的运动,而不充分的扭转刚度会导致上发条,这是没有相应输出位移的运动输入。
了下:运动控制技巧,运动控制•电机控制




告诉我们你的想法!