


在UR合作机器人上带有GRT夹持器的PneuConnect。来源:博士
Phd Inc.本月为其工业自动化的夹持器和配件添加了三种产品。它们旨在帮助机器人握住大物体,使定位和编程方便,以便最大效率,并便于机器趋势。PHD的产品旨在从通用机器人A / s的协同机器人武器或COBOTS工作。
韦恩堡。一位来自美国的博士说它很畅销夹子、线性滑轨,以及行业中最广泛的长寿命、健壮的执行器。它还提供工程软件和基于互联网的工具,以节省设计时间,从工厂培训的应用程序和行业专家的支持,以及快速的产品交付。
博士为GRR线增加了下巴旅行选项
该公司增加了一个300毫米(11.81英寸)下巴旅行模型GRR系列大容量气动抓钳。这些平行夹持器旨在提供高握力,五个长下颌行程和高负荷。
由于守护夹具可以承受高冲击和冲击载荷,因此PHD表示,它们适用于小型发动机块制造,汽车轮辋制造和铸造应用等应用。
还提供了系列eGRR高容量电动平行夹具,提供了与气动设计相同的益处。
可提供气动连接X2双夹持器
PHD还宣布发布了带有双抓手的气动- connext X2套件。它们可以安装到UR合作机器人,以实现自动化性能的最大效率。
pne - connect X2包括PHD的Freedrive功能,它与UR接口cobots.用于易于定位和编程。该套件采用以下标准组合:
- 两个GRT系列并联气动三爪钳
- 两个GRH系列并联长行程气动抓钳与模拟传感器
- 一个系列GRT GIPPER和一个系列GRH爪与模拟传感器
其他夹持器组合请联系PHD。
的Pneu-Connect®X2博士表示,这些特征如下:
- 五个流行的PHD气动夹持器选项,适用于各种各样的应用
- 两个夹具最大的自动化效率
- GRH系列GRH夹具现在提供在颌行程中提供颚位置反馈的模拟传感器
- 的Freedrive特性与UR有关易于定位和编程的接口
- 无缝,经济高效,终端效应集成
- 采用MAC阀门和控制板
- 适用于特定工具的通用夹具安装
- 更新的URCap软件包括直观,容易的设置
- 便于使用
下载pne - connect目录为更多的信息。
过渡板直接连接UR到线性驱动器
博士学位的过渡板允许通用机器人手臂直接连接到新的博士学位ESU系列电动皮带驱动直线执行器。该公司表示,它为每一个尺寸的手臂提供过渡板,“抚养机器趋向于全新的水平。”
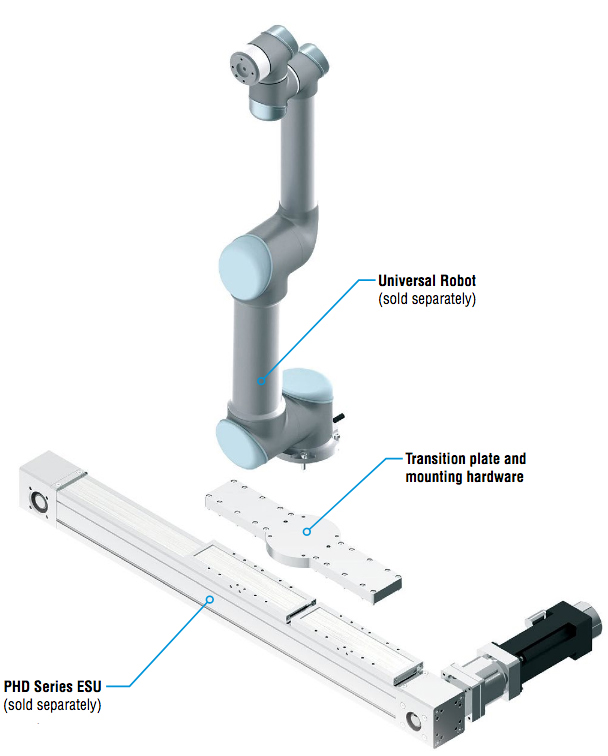
这个过渡板提供了第七轴为UR手臂与ESU线性驱动器。来源:博士
编目行程高达5500mm(216.53英寸),用户可以将UR10手臂的工作面积增加10倍。
了下:机器人的报告




告诉我们你的想法!