

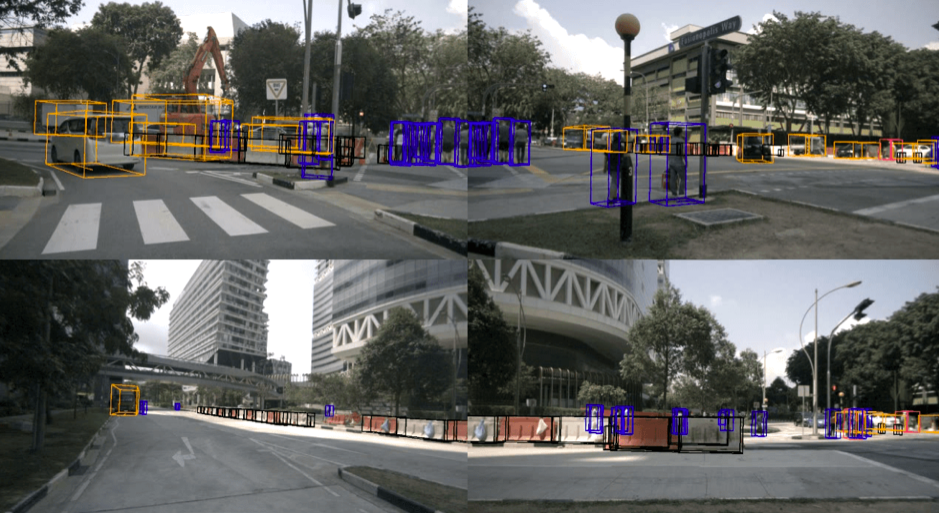
nuScenes数据集由nuTonomy和Scale创建(信贷:nuScenes)
数据是开发可靠数据的关键自动驾驶汽车. 但关键在于拥有正确的数据,而不一定是最多的数据。以及位于波士顿的自动驾驶汽车公司nuTonomy德尔福以4.5亿美元收购,认为它拥有正确的数据,可以让世界各地的研究人员开发安全的自动驾驶汽车。
nuTonomy发布了一个名为努塞内斯据nuTonomy称,这是“可供公众使用的最大的开源、多传感器自动驾驶数据集”城市景观,地图远景,阿波罗景观,及伯克利深驱仅关注基于摄像头的对象检测。
nuScenes数据集收集了波士顿和新加坡这两个城市的1000个场景,这两个城市都是nuTonomy自动驾驶汽车测试、密集交通和挑战性驾驶环境的发源地,其中包括140万个摄像头图像、40万个激光雷达扫描、130万个雷达扫描和110万个40k关键帧的对象边界框。
所有这些数据都被Scale的传感器融合注释API精心标注,该API利用AI和人类团队进行数据注释。nuScenes数据集中的所有对象都有一个语义类别,以及一个3D边界框和它们出现在其中的每个帧的属性。与二维边界框相比,这允许nuTonomy精确推断对象在空间中的位置和方向。这是名单nuScenes发布时提供的注释数量。
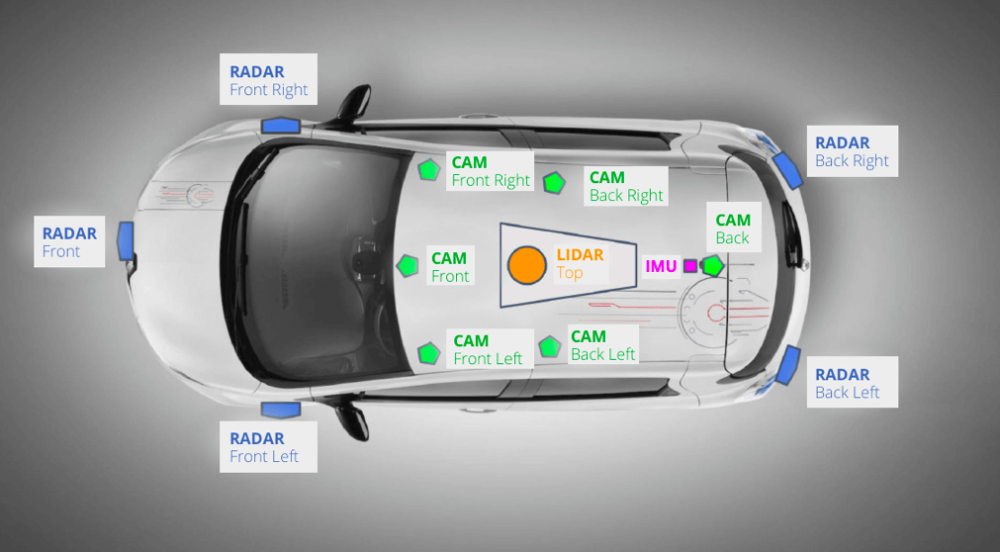
nuScenes数据集由两辆使用此传感器套件的nuTonomy车辆捕获(信贷:nuScenes)
nuScenes数据是由六台摄像机、一台激光雷达、五台雷达、GPS和一个惯性测量传感器组合而成。nuTonomy在波士顿和新加坡使用了两辆传感器布局相同的雷诺Zoe汽车。数据是从一个研究平台收集的,并不表明nuTonomy Aptiv产品中使用的设置。
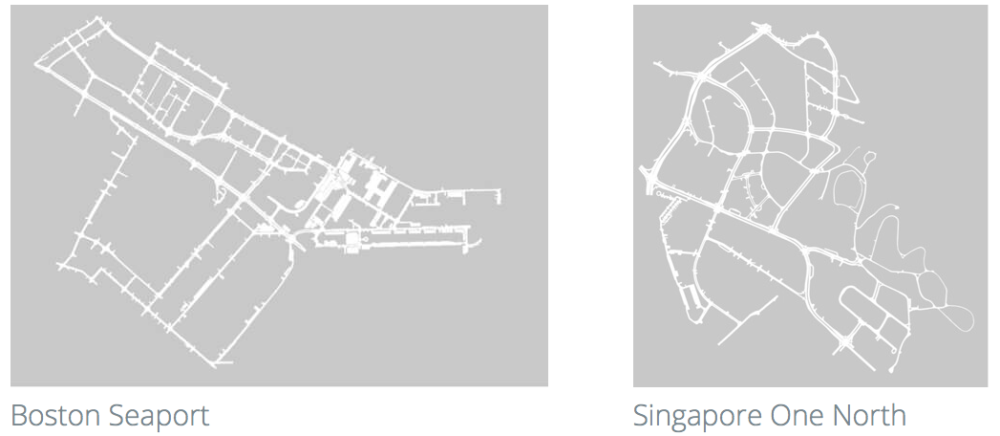
nuTonomy说,波士顿和新加坡的驾驶路线经过精心选择,以捕捉具有挑战性的场景。”我们的目标是提供不同的地点、时间和天气条件。为了平衡班级频率分布,我们加入了更多稀有班级的场景(如自行车)。“下面是各自行驶路线的图像。nuScenes也有一个在线工具使用已捕获的示例场景。
 Scale首席执行官Alexandr Wang表示:“我们很自豪能够提供注释……作为迄今为止发布的最健壮的开源多传感器自动驾驶数据集。”我们相信,这将是开发自动驾驶汽车系统的研究人员的宝贵资源,并将有助于在未来几年形成和加速其生产。”
Scale首席执行官Alexandr Wang表示:“我们很自豪能够提供注释……作为迄今为止发布的最健壮的开源多传感器自动驾驶数据集。”我们相信,这将是开发自动驾驶汽车系统的研究人员的宝贵资源,并将有助于在未来几年形成和加速其生产。”
相关的:MapLite使自动驾驶车辆能够在未映射的道路上导航
从2019年开始,nuScenes将组织有关目标检测和其他计算机视觉任务的挑战,以提供衡量性能的基准,并推进最新技术。nuScenes还可用于二维对象检测。使用已知的摄影机校准参数,它可以将三维对象边界框投影到任何摄影机中,因此也可以提供用于二维对象检测的框。
Scale的自动驾驶汽车客户还包括Lyft,通用汽车公司,通过其巡航业务部门,Zoox,Nuro,迄今已筹集了总计2270万美元。自2016年成立以来,该公司已为包括Lyft、Voyage、General Motors、Zoox和Bounch在内的客户标记了超过200000英里的自动驾驶数据。
根据以下文件提交:汽车,机器人报告




告诉我们你的想法!