

Since theiremergence in the early 1990s, eBikes have undergone a steady series of improvements in range, reliability, and performance that have won them a growing number of loyal users worldwide. Equipped with specially engineered frames, high-capacity Li-Ion batteries, and highly efficient drive control electronics, today’s eBikes have become a low-carbon option to cars for short commutes as well as delivery runs and recreational activities. Yet, despite nearly 30 years of technical evolution, there’s still room for innovation to help eBike manufacturers grow their presence in existing and new markets.
By Jonas Proeger | Trinamic Motion Control

Improved range, performance and usability are helping modern eBikes enjoy growing popularity as commuter, commercial, and recreational vehicles.
Some innovations in next-generation eBikes relate to better frame designs and mechanical systems. Others include advances in electronics for the motor drive and energy-storage systems. But the most dramatic changes are in eBike controls and user interfaces for maximally enjoyable user experience (UX).
Drivetrain innovations for eBikes
Most modern eBikes use permanent magnet motor (PMM) propulsion, with brushless dc motors (BLDC motors) being especially common. BLDC motors are one of the simplest forms of synchronous motor: These have a permanent-magnet rotor assembly surrounded by a wound stator having several (usually three) winding sets. BLDCs are lighter and more efficient that equivalent brushed motors — plus need little maintenance. The catch is they need a motor controller to provide a drive waveform (commutation). The controller does this by monitoring the rotor position and supplying power to the stator windings in the correct sequence to start and maintain rotor motion.
BLDC motor drive technology for eBikes is relatively mature but there are still a few places where designers can help differentiate products through lower cost or better performance and efficiency. For example, a growing number of eBike designers are using motor controllers capable of supporting vector control-based commutation — also known afield-oriented control(FOC).
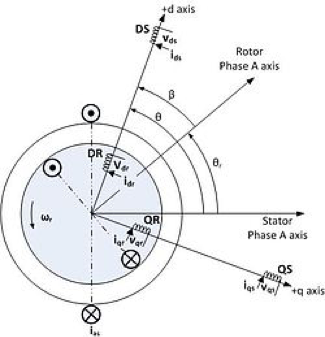
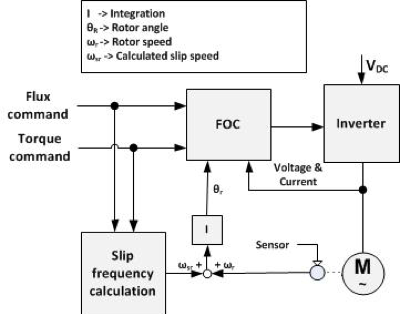
Above left: An FOC coordinate system superimposed on three-phase induction motor • Image courtesy of Lee, R. J.; Pillay, P.; Harley R. G. viaWikipedia. Above right: Simplified block diagram of a direct FOC controller • Image courtesy of Popescu, Mircea via Wikipedia | (2000) Induction Motor Modeling for Vector Control Purposes (PDF) — Espoo: Helsinki University of Technology. pp. 13–14.ISBN951-22-5219-8
The FOC algorithm can decouple control of torque and flux by transforming the stator current values (phase currents) from a stationary reference frame to a rotating reference frame. An FOC motor controller requires a processor powerful enough to support this compute-intensive algorithm as well as some means of accurately sensing rotor position — typically an analog or digital Hall-effect sensor or optical interrupter. In return, FOC helps the motor deliver excellent performance, a wide speed range, high operating efficiency, and high torque and low current at startup — characteristics that in turn boost eBikes’ drivability and range.
Because the sensors that determine rotor position can add cost and complexity to a design, eBike designs sometimes employ controllers that supportsensorlessoperation. In this mode, current readings and the back EMF generated by the motor’s windings can be used to estimate position and speed of the motor. Unfortunately, while this is a relatively easy task above a certain velocity, it is much more difficult at standstill and low velocities which occur every time the rider stops or starts. Although this is acceptable for some appliances and other applications, so-called sensorless FOC controllers for eBikes remain in the development stage.
Regenerative braking is another promising feature for some types of eBikes. Here, field windings of the eBike’s drive motor serve as a generator/brake to recover some of the bicycle’s kinetic energy as electrical power to charge the battery. The algorithms needed to support regenerative braking are relatively straightforward, but this function is only practical to implement in direct-drive systems where the motor is directly coupled to the wheel. Unfortunately, many eBike motors include a planetary gear drive (often coupled with a freewheel function) making regenerative operation impossible.
User experience the next frontier
尽管eBike动力传动系统技术已经成熟ver nearly 30 years, we can still expect to see incremental improvements that will be important though not market changing. In contrast, manufacturers have only begun to explore the ways they can make power-assisted pedal vehicles easier to operate, more fun to drive, and more adaptable to their rider’s abilities and mission requirements. So most of the market-defining innovations for emerging eBike designs will be in the UX they give riders.
Based on Trinamic’s involvement with several eBike projects, we’ve learned that the difference between a good e-bike and a bad one is mainly user experience, by which we don’t mean some fancy app to set the amount of pedal support [power assist ratio] or provide a detailed analysis of the rider’s performance. Instead, the prime definition of user experience is how the bike feels to the user. In other words, how it responds to the rider’s pedaling.
Natural cycling feel for eBikes
“Creating natural-feeling response to rider pedaling is a multi-faceted design challenge,” says Trinamic team leader software Development Enrico Dressler. He says the controllers of nearly all early eBikes and pedelecs used a pedal speed sensor (typically Hall effect sensors and a disc with magnets) as their primary input. As the rider pedaled faster, a controller algorithm increased support provided as inceased power to the motor.
This simple control scheme was reliable and easy to implement but had several unpleasant drawbacks. The controller only functioned when the pedals turned, so could not assist the user from a dead stop — precisely when it’s needed most. In addition, controllers that provided assist based solely on pedal speed gave riders an odd sensation. Processing delays and the nature of the algorithms themselves caused small but noticeable delay between the rider’s inputs and the bike’s response — so it felt as if the pedals were connected to the rear wheel via a large rubber band.
Pedal speed sensing also raised potential marketing issues in some countries that have strict definitions on how mopeds, motorcycles and other types of two-wheeled vehicles are taxed and licensed. Because a pedal-assisted eBike could, theoretically, provide assist even if there was no chain between the pedals and the rear wheel, it can be technically defined as an electric moped, according to some countries’ laws, thereby needing it to be licensed, regulated and taxed accordingly.
Over the years, eBike motor controllers have evolved to make power-assisted riding more natural and enjoyable. In an suitable world using a pedal-assisted eBike should feel just like cycling on superpowers. To reach this goal, Dressler adds that the motor controller must be able to sense the torque being applied at the pedals and use it as the primary means of determining how much assist it delivers. High quality controllers often supplement their torque-sensing inputs with pedal speed sensing to ensure support is provided only when the pedals are turning. Blending the sensor inputs prevents the system from providing assist in situations where it’s unwanted, such as when a rider is stopped at a traffic light with their foot on the pedal.
在几踏板可以测量扭矩l ways but most of today’s designs use sensors mounted in the crank bearing where they measure the torsion of the shaft as the rider applies pressure to the pedals using a foil-based strain gauge that changes resistance as a function of minute physical deformations of the surface it’s mounted to. The strain gauge is typically connected to a Wheatstone-based resistance measurement circuit that produces a 5-V analog output.
The pedal torque sensor is often integrated with a speed sensor so that the controller can provide a smoother, more effortless experience. A combined torque-speed sensing regime also lets the controller comply with local speed regulations for eBikes by reducing or cutting off the motor assist as the rider reaches the legal speed limit. Smart BLDC controller modules such asTrinamic’s TMCM-1630allow manufacturers to easily program their products to comply with regional speed regulations, as well as to fine-tune UX parameters.
This configuration puts the torque sensor in a location where it is protected from harm and can be easily wired to the controller, but it raises a new problem. Locating the sensor inside the bottom bracket only allows it to ‘see’ torque inputs from the left pedal. This is because right pedal is connected directly to the front chain sprocket so most of the inputs from the rider’s right foot are transmitted directly into the chain instead of through the crankshaft.

This speed and torque-sensing crank shaft manufactured by THUN-X provides two digital outputs for the digital sin/cos speed signal and an analog output for the torque signal. With this arrangement, the eBike’s motor controller requires only two digital inputs and one analog input. Image courtesy Enviado
This module, based on Trinamic’s TMC4671 smart motor controller IC, provides a complete solution for BLDC-based eBike drive systems. The controller’s powerful integrated MCU can be programmed to deliver a custom UX and obey regional laws regarding the maximum speed and response to pedal inputs. Image courtesy Trinamic Motion Control
As a result, Trinamic is investigating sensing schemes and control algorithms that make the bike’s motor respond in a manner that feels symmetrical and deliver torque to the drive wheel as soon as the rider starts to pedal The most cost-effective way to reduce or eliminate asymmetric assist is to use the inputs from the left pedal to estimate the amount of support that should be provided during the portion of the stroke where the right foot is providing the torque.
“Because the eBike will most likely be accelerating in a non-linear fashion, the algorithm that calculates the motor current for the right pedal stroke can’t simply match the left pedal’s most recent torque reading,” explains Enrico Dressler.
“We have solved that problem with a predictive algorithm that allows the controller to provide smooth, balanced assist during both halves of the pedal rotation. The same algorithms use pedal torque inputs to enable the eBike to deliver some assist from a dead stop, and then transition to a speed-torque mode once the bike is rolling,” he says.
智能马达控制器,如TrinamicTMC4671, provide eBike manufacturers with other ways to customize their products’ UX, including fine-tuning the torque-speed map to anticipated usage profiles. The controller can also add to user safety by monitoring its acceleration sensor and flashing the taillight to alert other drivers when it detects the bike rider is braking sharply.

LeichtLast is an experimental e-cargo eBike developed by Trinamic as a testbed for a new generation of e-cargo bikes. Thanks to its high-efficiency drive control system, regenerative braking, and other new capabilities these vehicles are expected to become a highly practical alternative to fossil-fueled delivery vehicles in cities and some suburban settings. Images courtesy TRINAMIC Motion Control
Technologies on the horizon for eBikes and other mobility designs
The new capabilities outlined here will make the upcoming generation of eBikes easier and more pleasurable to ride — making them more attractive to a larger number of potential users. Motor controllers that use smart torque sensing to provide zero-speed boost for easier starts will make eBike technology an increasingly attractive choice for the light delivery vehicles that carry everything from medical supplies to hot meals in many cities throughout the world. Agile, high-capacity electrically-assisted electric cargo bikes, such as theLeichtLAST technology demonstrator developed by Trinamic, have the potential to dramatically reduce traffic congestion, pollution, and carbon emissions in cities across the planet.
It’s also likely that the same technology will be applied to improve so-called hybrid wheelchairs that are manually operated but deliver a pre-selected level of assistance to the user. Equipped with motors and force sensors on each wheel, hybrids such as theTwion from Alberg GmbHlet people with good upper arm strength travel more and to negotiate steep grades without assistance. They also provide a more agile (and less expensive alternative) to bulkier fully-powered wheelchairs for people who still have some use of their arms. The same algorithms used to provide a more comfortable and natural-feeling UX for eBike users will let hybrid wheelchair users travel more effortlessly and efficiently.
But these improvements in UX are only the beginning. As the industry’s understanding of rider physiology and neuro-psychological response grows, researchers will be able to translate it into features that provide an even better user experience.

Alber’s Twion electric assist system can be added to nearly any wheelchair. The self-contained power wheels are entirely self-contained and feature selectable assist levels, regenerative braking, and a range of up to 20km. Image courtesy Alber GmbH
Filed Under:Motion Control Tips,Flanges • supports • mounts • brackets




Tell Us What You Think!