

一辆小型氢燃料电池汽车保持着吉尼斯世界纪录中最高效的汽车…并使用了来自德国的无槽无刷60L-H-175-aKoford汽车驱动它的后轮。今年,这辆小型汽车从杜克电动汽车团队超过了PAC CAR 2的12600英里/加仑的效率,PAC CAR 2是由瑞士Zürich的Eidgenössische Technische Hochschule (ETH)的一个学生团队设计的。

杜克汽车将化学能(储存在氢气中)转化为机械能的效率最高。
根据帕特里克·格雷迪他们的燃料电池汽车Maxwell(在其最后一次世界纪录迭代中)的设计速度为每小时15英里,总功率为40.8瓦(来自氢化学能源)。在基于Maxwell前辈的重新设计中,该团队发现其名义燃料电池效率为58%燃料电池产生的平均电能(电机使用)不能超过23.6 W.在电机和传动系统效率为87%左右的情况下,机械功率耗散不能超过20.6 W。
杜克大学的团队广泛使用23-W目标来快速决定换什么组件更好。
Grady解释道:“对于Maxwell原型来说,我们选择的Teensy 3.2微控制器在5v供电时的功率约为300兆瓦,所以如果我们在最终的Maxwell设计中使用Teensy,那么仅仅供电微控制器就会损失1.3%的效率。”
确保效率的另一个关键是计算平均功率水平,然后优化燃料电池系统,使其达到最高效率。但在一场有代表性的比赛中,电机的平均负载是23瓦,而杜克大学团队最初的设计使用的电机效率最高为80瓦。
还有一个问题:为了在比赛中保持速度,车手会开或关发动机。因此,为了允许这种操作模式,该团队考虑了一些系统架构:
空载调平-电机控制器直接连接到燃料电池输出,两者之间无储能
无源负载均衡-带有一个连接到燃料电池输出的大型超级电容器组
主动负载调平-在燃料电池和超级电容器组之间配备定制DC/DC转换器,用于控制整个燃料电池
燃料电池在恒定负载下比动态负载下效率更高。这一事实(以及一个更大的燃料电池堆栈输出80w比堆栈大小为23w有更高的泄漏和辅助损失)意味着杜克团队需要一些东西来调节从堆栈的发动机提取。
第一种方法需要燃料电池提供全部的电机功率,并优化到80瓦左右的电机功率,而不是汽车的名义上的23瓦。更糟糕的是,这样的设计将需要对0-W条件进行“优化”——在这种情况下要求低气体泄漏和潜在电流。所以团队否决了这个设计。
第二种方法是杜克大学团队在2018年壳牌生态马拉松比赛中使用的一种方法。该装置采用dc/dc变换器,用软件主动控制电源,将燃料电池电压提高到更高的超级电容器和电机电压。这种可配置的变换器从燃料电池中提取恒定功率,并将其放入超级电容器组以提高效率。这完全分离了燃料电池和发动机,是理论上最清洁的选择。但在2018年的生态马拉松比赛中,杜克团队的转换器的效率仅为96%。此外,它(以及相关的软件和硬件)引入了复杂性和设计问题。
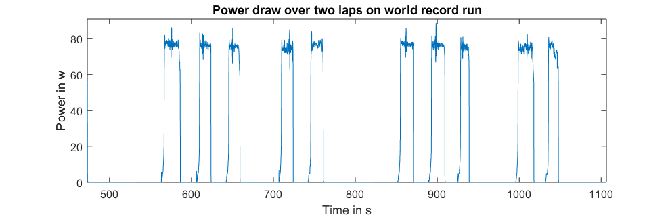
因此,为了保持麦克斯韦的世界纪录,杜克大学的团队采用了被动负荷平衡。这里,超级电容器组与燃料电池和电机控制器并联。燃料电池不断地向超级电容器输送能量……然后电机以高功率脉冲向电池组放电。超级电容器的尺寸被选择用来保持燃料电池在一圈内的电压和功率恒定。超级电容器使汽车重量增加了约2千克,但其简单性使汽车设计更加坚固——燃料电池的动态损耗小于dc/dc转换器到后备箱的损耗。
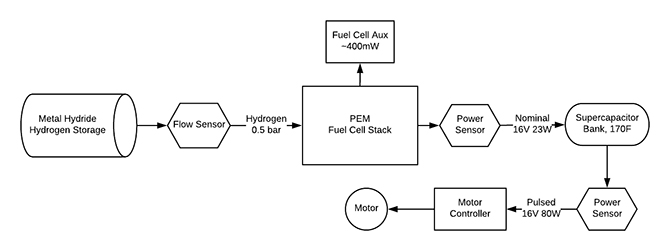
这里展示的是麦克斯韦动力系统的能量流。
更具体地说,超级电容器的运行效率优于99%(内阻损失)…麦克斯韦汽车的超级电容器组只有大约10 mOhm -远低于同类锂离子解决方案。
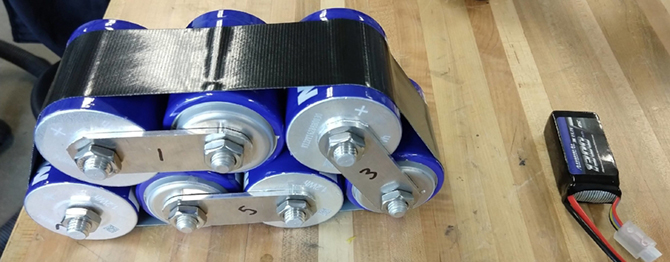
这里展示的是麦克斯韦的1200F超级电容器,旁边是一个同等容量的锂聚合物(LiPo)单位。
电动机在保持汽车效率方面发挥了作用
麦克斯韦效率的关键是拥有一个高效的电动机,它重量轻,可重新配置,以适应无数输入电压。
很少有电机制造商列出他们的电机的理论效率,更少的衡量动态结果。不幸的是,大多数供应商专注于优化功率密度或成本……所以我们努力寻找专注于效率的资源,”Grady说。“我们的团队最终选择了Koford Motors为Maxwell提供动力。他们的数据表非常有用,他们的电机非常高效——没有动态结果来量化这种效率。”
更具体地说,研究小组挑选了一台Koford 60L-H-175-a发动机,其最高效率约为92%,非常适合Maxwell的尺寸。

图中(背景为黑色)显示的是一辆科福德60L-H-175-A发动机,它的链轮与链条相连,最终推动了世界上效率最高的汽车的动力轮。
与无刷电机配对的是一个链条传动-将动力从电机轴转移到麦克斯韦的后轮。在最后一个创纪录的马克斯韦尔动力系统中,25号链条通过连接到科福德发动机的14T链轮运行,然后一个120T链轮驱动马克斯韦尔后轮上的飞轮。链条传动让杜克团队轻松地改变齿轮传动比,让电机以最高效率运行,这很有帮助,因为电机和驱动器在100%占空比(接近最高速度)时效率最高。
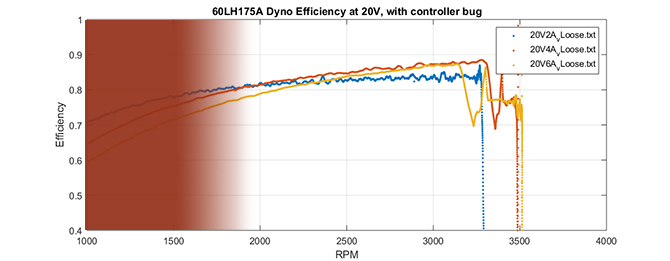
杜克大学的学生们制作了一个惯性测力计来测量他们自己购买的发动机的效率。这里用红色部分掩盖的结果掩盖了由于错误编程的电机控制器误报低速效率而导致的不准确的结果。真实的效率曲线更平坦,这里显示的高速结果更准确。学生得到了他们的效率结果后,链传输(税收高峰效率3 - 4%)。
直接传动的选择吗?不是为了这个高效的设计
杜克大学团队考虑在麦克斯韦使用直接驱动轮毂电机,因为这种电机理论上比连接到动力传输部件的电机更有效。但研究小组只发现了重型轮毂电机,记录不清,或者是为低成本电动自行车设计的。
麦克斯韦的电机控制器使用霍尔传感器反馈实现简单的块换向。该团队尝试了混合霍尔和反电动势换向以获得更精确的计时,但发现其实现与经典霍尔换向的性能不匹配。
为了节省电能,麦克斯韦被编程在电机不运转时关闭大多数电气系统。这辆车的司机只得到一个控制马达的按钮,而不是更标准的油门电位计。按下按钮后,该按钮触发唤醒序列,并以恒定电流对电机进行节流。取消驾驶员的油门控制可使电机保持在最佳点附近运行,从而提高一致性和性能。
访问这个博客深度链接duke-ev.org获取更多关于麦克斯韦燃料电池汽车的信息,以及与获得麦克斯韦现成产品的最佳性能相关的挑战地平线H-100 PEM燃料电池.格雷迪还在博客中解释了车队在不同赛道上进行的高级分析,从中挑选出一条最有可能让麦克斯韦尔打破车辆效率世界纪录的赛道。
了下:运动控制技巧,电容器



告诉我们你的想法!