


麻省理工学院CSAIL的MapLite可以让无人驾驶汽车在没有3D地图的情况下在从未上过的道路上行驶。(来源:麻省理工学院CSAIL)
在人迹罕至的道路上航行自动驾驶汽车是一项艰巨的任务。原因之一是,无人驾驶汽车能真正行驶的地方并不多。像谷歌这样的公司只在主要城市测试他们的车队,他们花了无数的时间精心标记车道、路沿、出口和停车标志的确切三维位置。
“汽车利用这些地图来知道自己在哪里,以及在出现新的障碍(如行人和其他汽车)时该做什么,”该公司主管丹妮拉•罗斯(Daniela Rus)表示麻省理工学院计算机科学和人工智能实验室(权力)。“对密集的3d地图的需求限制了自动驾驶汽车可以运行的地方。”
事实上,如果你生活在美国数百万英里未铺柏油、没有照明或标记不可靠的道路上,你就不走运了。这类街道的地图绘制通常要复杂得多,交通流量也少得多,因此企业短期内没有动力为它们开发3d地图。从加州的莫哈韦沙漠到佛蒙特州的怀特山脉,自动驾驶汽车根本没有准备好应对美国的大片地区。
解决这个问题的一种方法是创建足够先进的系统,在没有这些地图的情况下导航。在重要的第一步,罗斯和他在CSAIL的同事已经开发了MapLite该框架允许无人驾驶汽车在没有3d地图的情况下在从未上过的道路上行驶。
MapLite将谷歌Maps上的简单GPS数据与一系列观察路况的传感器结合在一起。这两项技术让该团队能够在马萨诸塞州德文斯的多条未铺设的乡村道路上自动驾驶,并能够提前100多英尺可靠地检测道路。(作为与丰田研究所合作的一部分,研究人员使用了一辆丰田普锐斯,他们配备了一系列激光雷达和IMU传感器。)
[阅读:Waymo为自动驾驶车队增加了2万辆捷豹电动I-PACE suv]
“这种‘无地图’的方法之前没有真正被采用的原因是,它通常很难达到与详细地图相同的准确性和可靠性,”CSAIL研究生Teddy Ort说,他是一篇关于该系统的相关论文的主要作者。“这样一个只需要车载传感器就可以导航的系统表明,自动驾驶汽车在实际处理道路方面有潜力,而科技公司绘制的道路数量很少。”
这篇论文将于5月在澳大利亚布里斯班举行的国际机器人和自动化会议(ICRA)上发表,由Ort、Rus和博士研究生利亚姆·保罗(Liam paul)共同撰写,利亚姆·保罗现在是蒙特利尔大学的助理教授。
尽管自动驾驶汽车取得了诸多进步,但它们的导航技术与人类相比仍然相形见绌。考虑一下你自己是如何出行的:如果你要去一个特定的地点,你可能会在手机里输入一个地址,然后在路上偶尔查看一下,比如当你接近十字路口或高速公路出口时。
然而,如果你像大多数自动驾驶汽车一样在世界上穿行,你基本上会在走路的时候一直盯着手机。现有的系统仍然严重依赖地图,只使用传感器和视觉算法来避开行人和其他汽车等动态物体。
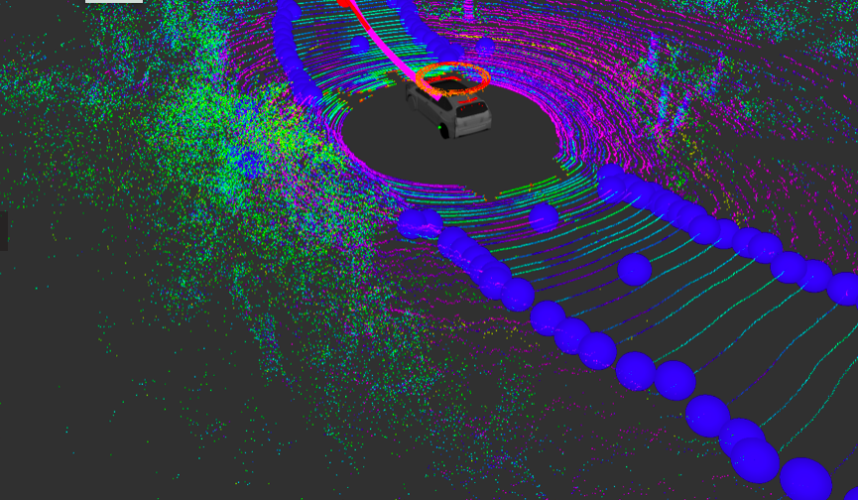
相比之下,MapLite在导航的各个方面都使用了传感器,仅依靠GPS数据来获得汽车位置的粗略估计。该系统首先设定一个最终目的地和研究人员所说的“局部导航目标”,这个目标必须在汽车的视野之内。然后,它的感知传感器生成一条到达该点的路径,使用激光雷达来估计道路的边缘位置。MapLite可以在没有实际道路标记的情况下做到这一点,方法是假设道路会比周围地区相对平坦。
罗斯说:“我们的极简制图方法使自动驾驶能够在乡村道路上使用当地的外观和语义特征,如停车位或边路的存在。”
该团队开发了一个“参数化”的模型系统,这意味着它们描述了一些类似的多种情况。例如,一个模型可能足够宽,可以决定在十字路口做什么,或在特定类型的道路上做什么。
MapLite不同于其他的无地图驾驶方法,后者更多地依赖于机器学习,通过对一组道路的数据进行训练,然后在其他道路上进行测试。
“在一天结束的时候,我们希望能够问汽车一些问题,比如‘有多少条道路在这个十字路口合并?”表示支持。“通过使用建模技术,如果系统不能工作或卷入事故,我们可以更好地了解原因。”
MapLite仍然有一些局限性。例如,对于山路来说,它还不够可靠,因为它没有考虑到海拔的急剧变化。作为下一步,该团队希望扩大车辆可以处理的道路的多样性。最终,他们希望他们的系统达到与映射系统相当的性能和可靠性水平,但范围要更广。
“我想,未来的自动驾驶汽车总会在城市地区使用3d地图,”Ort说。“但当人们要求这些车辆在人迹罕至的道路上行驶时,它们需要像人类一样擅长在从未见过的陌生道路上驾驶。”我们希望我们的工作是朝着这个方向迈出的一步。”
该项目得到了美国国家科学基金会(National Science Foundation)和丰田研究计划(Toyota Research Initiative)的部分支持。
这篇文章被转载麻省理工学院的新闻.
了下:汽车,机器人的报告




告诉我们你的想法!