

麻省理工学院的工程师们已经创造了柔软的3d打印结构,它的运动可以通过磁铁的波来控制,很像没有绳子的提线木偶。
可以通过磁力控制的各种结构包括一个可以向上折叠的光滑环,一个可以挤压关闭的长管,一个可以自我折叠的薄片,以及一个蜘蛛状的“抓取器”,它可以爬行,滚动,跳跃,并快速聚合在一起以抓住一个传球的球。它甚至可以被引导把自己包裹在一个小药片上,并把它带过桌子。
研究人员用一种新型的3d打印墨水制造了每一个结构,他们注入了微小的磁性颗粒。他们在3d打印机的喷嘴周围安装了一个电磁铁,当墨水通过喷嘴时,这使得磁颗粒摆动成单一方向。通过控制结构中各个部分的磁场方向,研究人员可以生产出结构和设备,当不同部分对外部磁场做出反应时,这些结构和设备几乎可以瞬间转换成复杂的结构,甚至可以四处移动。
研究人员用一种新型的3d打印墨水制造了每一个结构,他们注入了微小的磁性颗粒。来源:麻省理工学院
麻省理工学院机械工程系和土木与环境工程系诺伊斯职业发展教授赵宣和说,该小组的技术可能被用于制造磁控制生物医学设备。
“我们认为,在生物医学领域,这项技术将有广阔的应用前景,”赵说。“例如,我们可以在血管周围放置一个结构来控制血液的泵送,或者使用磁铁引导设备通过胃肠道来拍摄图像,提取组织样本,清除堵塞,或将特定的药物输送到特定的位置。你可以设计、模拟,然后打印来实现各种功能。”
赵和他的同事今天在杂志上发表了他们的研究结果自然.他的合著者包括麻省理工学院的Yoonho Kim, Hyunwoo Yuk和Ruike Zhao,以及新泽西理工学院的Shawn Chester。
将字段
该团队的磁激活结构属于软驱动装置的一般类别——黏糊糊的、可成型的材料,被设计成通过各种机械手段进行变形或移动。例如,当温度或pH值变化时,水凝胶装置会膨胀;形状记忆聚合物和液晶弹性体在热和光等充分刺激下会变形;气动和液压装置可通过向其泵入空气或水来驱动;介电弹性体在电压下会拉伸。
但是水凝胶、形状记忆聚合物和液晶弹性体反应缓慢,在几分钟到几小时内就会改变形状。空气和水驱动的设备需要连接到泵的管道,这使得它们在远程控制应用中效率低下。介电弹性体需要高电压,通常在一千伏特以上。
金说:“目前还没有一种理想的软体机器人可以像人体一样在封闭的空间中工作,在那里你需要不受束缚地执行某些任务。”“这就是为什么我们认为磁驱动这个想法有很大的前景,因为它快速、有力、对身体无害,而且可以远程控制。”
其他研究小组已经制造出磁激活材料,尽管他们实现的动作相对简单。在大多数情况下,研究人员将聚合物溶液与磁珠混合,并将混合物倒入模具。一旦材料固化,他们会施加磁场均匀磁化珠子,然后再从模具中取出结构。
Yuk说:“人们只制造了拉长、收缩或弯曲的结构。”“挑战在于,如何设计一个结构或机器人来执行更复杂的任务?”
域的游戏
研究小组寻找的不是用相同方向的磁粒子制造结构,而是创造磁“域”——结构的各个部分,每个部分的磁粒子方向不同。当暴露在外部磁场中时,每个部分都应该以不同的方式移动,这取决于其粒子对磁场的响应方向。通过这种方式,该小组推测结构应该执行更复杂的关节和运动。
利用他们新的3d打印平台,研究人员可以打印结构的部分或区域,并在区域打印时通过改变包围打印机喷嘴的电磁铁的方向来调整特定区域内磁粒子的方向。
该团队还开发了一个物理模型,可以预测打印的结构在磁场下如何变形。考虑到印刷材料的弹性,结构中畴的模式,外加磁场的作用方式,该模型可以预测整体结构的变形或移动方式。瑞克发现,该模型的预测与该团队用许多不同的打印结构进行的实验非常吻合。
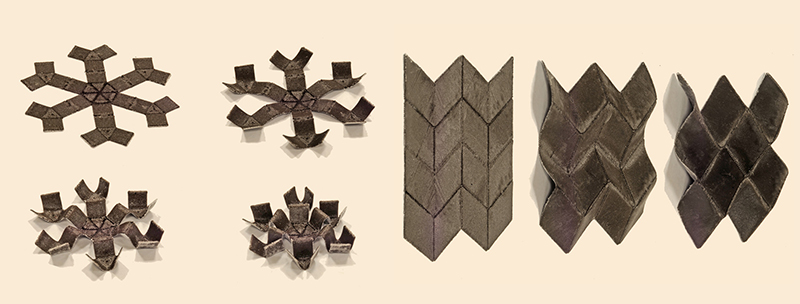
除了波纹环、自挤压管和蜘蛛状抓取器,该团队还打印了其他复杂结构,如一组沿两个方向快速收缩或扩张的“辅助”结构。赵和他的同事还打印了一个嵌入电路和红色和绿色LED灯的戒指。根据外部磁场的方向,这个环会变形,以编程的方式点亮红色或绿色。
“我们已经开发了一个打印平台和一个预测模型,供其他人使用。人们可以设计自己的结构和领域模式,用模型验证它们,并打印它们来驱动各种功能,”赵说。“通过编程复杂的结构、域和磁场信息,甚至可以打印出机器人等智能机器。”
乔治亚理工学院机械工程教授Jerry Qi表示,该团队的设计可以实现一系列快速、远程控制的软机器人,尤其是在生物医学领域。
“这项工作非常新颖,”没有参与这项研究的祁说。“人们可以在人体内或不容易到达的地方使用软机器人。利用本文报道的这项技术,人们可以在人体外施加磁场,而不使用任何电线。由于其反应速度快,软机器人可以在短时间内完成许多动作。这些对实际应用非常重要。”
了下:运动控制•电机控制



