

KIST的研究结果表明,比起通过数值计算或编程,人类可以直观地教会机器人灵活。信贷:基斯
韩国科学技术研究院(KIST)智能与交互机器人中心(Center for Intelligent & Interactive Robotics)表示,由金基勋(Kee-hoon Kim)博士领导的一个团队开发出了一种通过人体演示来教授“阻抗控制机器人”的方法。它利用肌肉的表面肌电图,成功地教会机器人像足球运动员一样抓住掉落的球。
表面肌电图(sEMG)是肌肉激活过程中产生的电信号,可以被皮肤表面捕捉到KIST它是由总统李秉权(byung - kwon Lee)领导的。
近年来发展起来的阻抗控制机器人,开启了一个基于人类肌肉和关节的自然弹性的机器人时代,这是传统刚性机器人所缺乏的。拥有灵活关节的机器人有望像人类一样奔跑、跨栏和从事体育运动。然而,教会这些机器人以这种方式移动所需的技术直到最近才问世。
KIST利用人体肌肉信号来教机器人如何移动
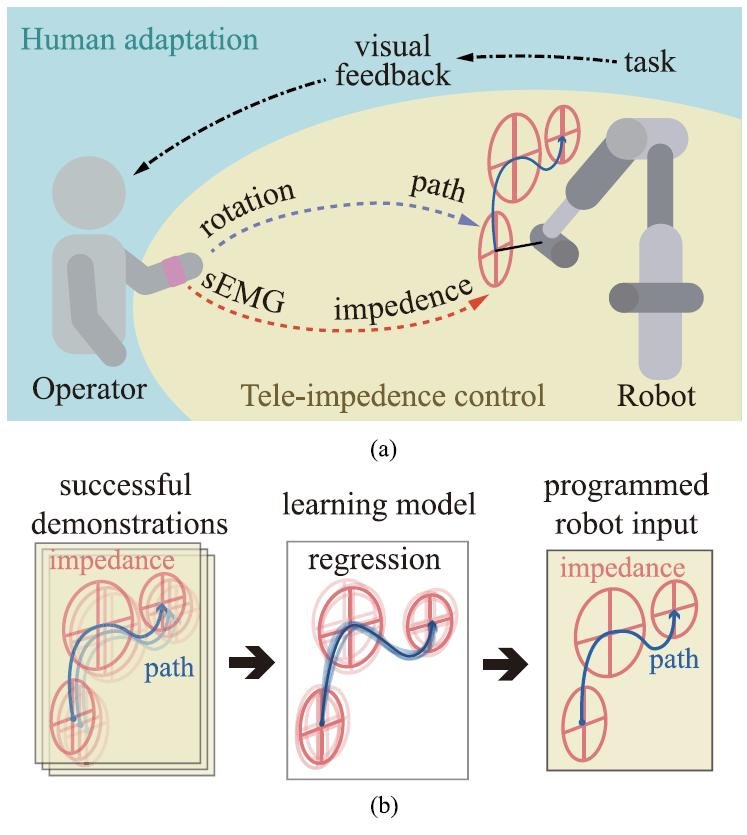
KIST研究组表示,在世界上首次开发出了利用人体肌肉信号向阻抗控制机器人传授新动作的方法。这项技术不仅可以检测人类的动作,还可以通过表面肌电信号(sEMG)检测肌肉收缩,机器人可以根据人类的演示模仿动作。
Kim Kee-hoon博士的团队表示,他们成功地利用表面肌电技术教会机器人在一个快速下落的球接触到固体表面或弹得太远而触不到之前迅速而熟练地抓住它——类似于足球运动员使用的技术。
表面肌电信号传感器被安装在一个人的手臂上,让他可以同时控制机器人的位置和快速上下运动的灵活性。然后,这名男子亲自演示,“教”机器人如何捕捉一个快速下落的球。在学习了这个动作后,机器人能够在没有任何外部帮助的情况下熟练地捕捉掉下来的球。
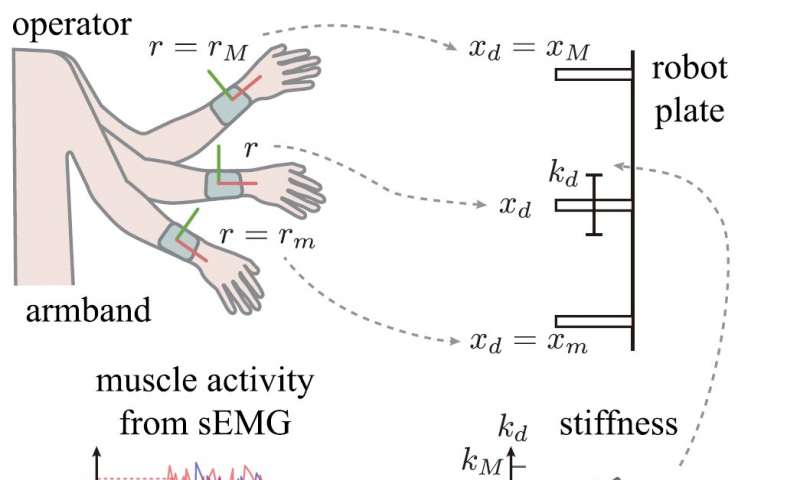
装在人手臂上的表面肌电信号传感器可以让人控制机器人快速移动时的位置和灵活性。来源:基斯
这一研究成果表明,机器人是可以由人类直观地教会其灵活的。这一研究成果引起了广泛关注,因为它并没有通过对机器人的运动进行数值计算或编程来完成。本研究将有助于进一步深入研究人类和机器人之间的互动这让我们离机器人成为我们日常生活不可或缺的一部分的世界又近了一步。
金教授表示:“此次研究的重点是向机器人传授人类技能,这是人类与机器人互动研究的重要成果。”
了下:机器人的报告,机器人技术•机器人抓手•末端执行器




告诉我们你的想法!