


随着失业率降至近50年来的最低水平,对自动拣箱的需求迫在眉睫。在美国,38%的制造业劳动力在箱子和制造机器之间搬运零件,50万个工作岗位仍然空缺。自动化行业正在努力满足这种需求:每一次自动化贸易展会都会增加一些新公司,他们声称最终解决了捡垃圾的难题。
自动化2018例如,在慕尼黑,至少有14场捡垃圾箱的游行。但即使是在大型制造商,也几乎找不到拾荒站。而在中小企业,这一数字接近于零。
为什么自动拣箱系统的采用率如此之低,而需求如此之大,如此之多的供应商声称能提供解决方案?
自动拣箱是个复杂的问题
简单的答案是,在大多数情况下,自动拣箱只是部分解决了问题。从垃圾箱中随机挑选零件,并将其精确地放入机器中,这对人类来说是一项简单的任务,但对机器人来说却是一项艰巨的任务。机器人必须能够以无限个方向抓住零件,并深入到垃圾桶的角落,同时避免与垃圾桶、其他部件或工作单元本身碰撞。
目前,只有一个庞大的系统集成项目,需要多种先进技术的协同工作,才能实现拣箱的完全自动化。这些包括:
- 零件、料仓、机器人末端执行器、放置目标和任何环境障碍的3D模型
- 一种或多种使用末端执行器拾取零件并将其放置在放置目标处的方法的模型
- 一个三维传感器来绘制箱子
- 图像分析软件定位每个部分和潜在的障碍在bin
- 路径规划软件,以找到一个无碰撞的路线,从零件的拾取点到放置目标
- 机器人控制软件,以机动机器人,末端执行器,和部分沿路线
有一些商业拣箱系统包含了其中的一些组件,并解决了拣箱挑战的一个子集。通常这些系统将3D传感器与运行在单独计算机上的图像分析软件结合在一起。机器人专家需要将传感器、计算机、软件和机器人控制器集成在一起,然后编写程序来检索每个部件的位置,并找出如何将其送到放置目标。(参见图1。)
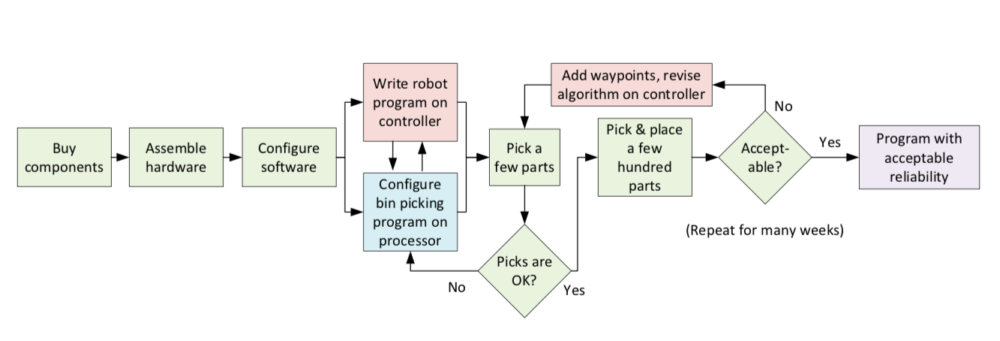
图1:商业拣箱系统的典型安装和编程。(来源:活质体)
从部件方向的无限变化开始,创建一个通用的路径规划算法几乎是不可能的任务。在最好的情况下,几周到几个月的实验和调优会产生一个性能不可靠的专门算法。
因为拣箱子非常复杂,专家们试图应用深度学习技术。到目前为止,结果令人失望,至少在工业上是这样。人工智能(AI)对于图像分类和语音识别等精度较低的应用是有效的。但人工智能根本不具备制造商所需的可靠性和准确性,无法取代人类操作员捡垃圾。
由于需要大量的集成和编程工作,因此大多数实际的拣箱部署都是在大型、复杂的制造商(如汽车原始设备制造商)中进行的,这并不奇怪。但大多数垃圾箱和制造机器都在中小型企业,这些企业占全球工业劳动力的69%。中小企业劳动力短缺最严重,但建立拾荒系统所需的资本和专业知识最少。

图2:具有路径规划的集成系统的安装和编程(来源:活质体)
路径规划是易用性和可靠性的关键
真正通用的拣箱解决方案需要非专家也能使用,在几个小时内可配置,提供复杂的路径规划,只需很少或不需要调优,并且对中小企业具有成本效益。这个解决方案将真正实现捡垃圾的大众化。(参见图2。)
在一个完全预先集成的系统中,底层软件管理所有的复杂性。所有系统组件(传感器、成像和路径规划软件以及协处理器)都是预配置的,无需设置即可插入机器人控制器,将安装时间缩短至几个小时。
所有的编程都与机器人的teach pendant集成在一起,使得拾取垃圾箱的动作可以使用相同的编程接口与标准的机器人命令自由混合。培训时间非常短。
安装和编程由一系列向导指导,这些向导模拟了人类操作员必须经历的训练,例如,如何拿起一个部件,把它放在哪里,避开障碍物,等等(参见图3)。

图3:Energid的Actin软件已在NASA航天器、石油钻井平台上的自主机器人、外科手术应用程序和工业自动化等关键任务应用中得到验证,该软件在幕后工作,可实时自动化每个部件的路径规划,提高性能和可靠性,无需用户定义路径点和手动调优。(来源:活质体)
到目前为止,为箱子中的每个部件规划一条唯一的、无碰撞的通往放置目标的路径是拣箱子最棘手的挑战,通常需要自动化专家发挥独创性。路径规划是系统可靠性的主要决定因素,如果做得不好会导致碰撞,零件落在垃圾箱或掉落,以及偏离目标。
最后,为中小企业提供一个拾荒解决方案
那么,我们是否可以宣布捡垃圾桶的问题已经彻底解决,人工机器照料已经成为历史?并非如此,因为总有一些应用程序过于复杂,无法实现自动化,在可预见的未来还需要人工操作。
然而,成本效益高的协作机器人、3D成像和智能运动控制软件的进步已经实现了新一代的拣箱解决方案,可以处理更多当今的机器应用,并使制造商能够将有限的资源转移到更高价值的任务上。更重要的是,对中小企业来说,拾取垃圾变得更容易,而且成本更低。

作者简介
Eric Truebenbach是Teradyne.Eric目前担任机器人应用业务开发主管活质体该公司最近被Teradyne收购。他擅长识别新技术、应用程序和一流公司结合所创造的市场机会。在担任现职之前,Eric曾担任一家内部初创公司的领导者、工程经理、项目经理、架构师和电子工程师。他在自动化和仪器仪表设计方面拥有多项专利,并撰写论文并在技术会议上发表演讲。
了下:AI•机器学习,机器人报告




“38%的制造业劳动力在箱子和制造机器之间搬运零件,50万个工作岗位仍然空缺。”
一旦这50万个空缺职位被机器人填补,目前由人类填补的38%的职位需要多长时间才能被取代?