

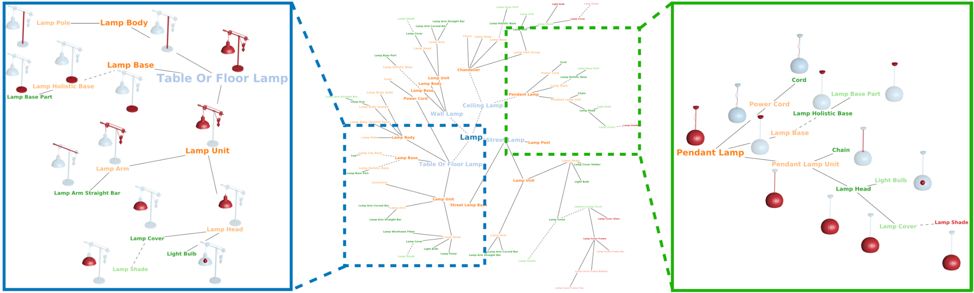
PartNet的专家定义的“灯”层次模板,以及台灯(左)和吊灯(右)的实例化。来源:英特尔
英特尔公司一直是研究人工智能,机器学习和计算机愿景的强大支持者,其两个合作对机器人有影响,这些机器人在家庭中的动态环境中运行。本周,俄勒冈州立大学的英特尔AI实验室和研究人员和加州大学圣地亚哥,呈现了一个用于训练对象识别的新型加固学习和大规模数据集的论文。
“我们想要扩展机器学习的两种方法,以更复杂的交互设置探索空间,”他说酌唐他是英特尔人工智能产品组的首席工程师。“在设计和资助涉及新兴领域的大规模数据集方面,工业界可以做很多事情。”
在钢筋学习中,机器可以选择选择潜在的奖励,或者他们可以探索他们的环境以收集更多的数据,更稳健决策.在36日国际机器学习会议本周,来自俄勒冈州立大学和英特尔人工智能实验室的研究人员提供了一个解决方案,他们称之为“协作进化强化学习”(CERL)。
识别诸如门把手、开关或杯子把手等日常物体对机器人进行交互至关重要。视觉人工智能面临的一个主要挑战是为大型数据集添加上下文。
本周,加州大学圣地亚哥分校助理教授苏浩(Hao Su)和英特尔人工智能实验室的深度学习数据科学家苏巴纳·特里帕蒂(Subarna Tripathi)在2019年世界计算机大会上发表了一篇论文计算机视觉与模式识别学术会议介绍Partnet。他们称之为“具有细粒度分层,实例级别的注释的第一个大型数据集。”
Cerl结合了强化学习方法
“我们正在考虑将算法从游戏场景扩展到具有更多现实约束的内容,”他说Somdeb Majumdar他是英特尔人工智能实验室(Intel AI Lab)的深度学习数据科学家。“在使用实体机器人与人类互动之前,还有很多问题需要解决。”
Majumdar告诉我们,而不是为每个可能的决定进行编程,而不是为各种可能的决定,传统的强化学习(也称为策略网络)使用策略梯度方法机器人的报告.这些有利的政策可能更高的奖励可能更高的积极奖励。
另一种方法是进化算法(EA),其受自然演进的启发,是一种基于人群的算法,可以在每一代中选择强烈的候选。但是,EA需要更多的处理时间,因为它仅在探索剧集后评估候选者,解释了英特尔和OSU重置。
CERL结合了策略梯度和EA方法,允许更快的机器学习,同时也可以在更长的时间框架内处理奖励。结果,研究人员发现CERL解决了这个问题标准的学术标准使用更少的累积训练样本比任何一种方法单独。
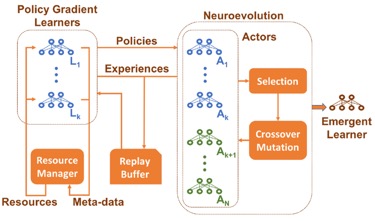
高层方面示意图。来源:英特尔
“俄勒冈州立大学的这项工作可以追溯到6到8个月前,”Majumdar说。“在过去的四个月里,我们扩大了规模,让多个机器人执行单一的协调任务。”
“每次互动都有10个候选对象,因为每个机器人解决的是不同的部分。他们很快就找到了解决方案。“因为这种基于群体的方法,我们不需要调整神经网络的行为。计算出有多少层或过滤器通常需要花费一些时间,但我们能够将问题转嫁给大众。”
它还利用了大型CPU集群,而不是内存有限的gpu。“功率传播开环是非常密集的cpu,大型集群更有效地探索空间,”Majumdar说。“我们正在利用现有的不同类型的集群。”
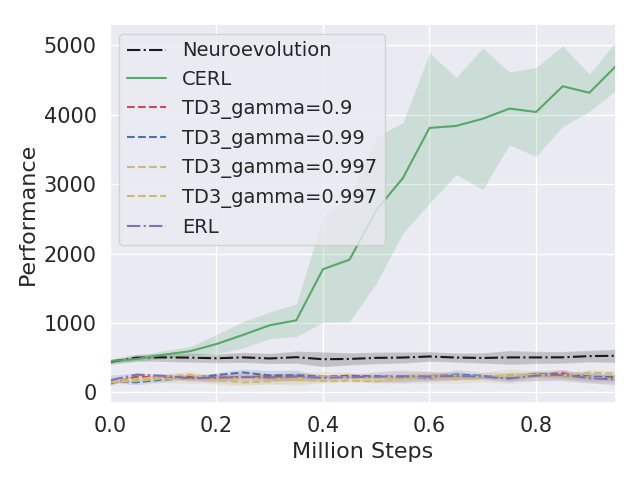
在一个基准在美国,CERL实现了人形机器人的3D模型走并在仿真中的1M时间步骤中保持4,702步的持续节奏。
“我们正致力于将一些算法从模拟陷入人形机器人,以走在俄勒冈州不同的表面上,”Majumdar说。“随着更多机器人实验室参与其中,我们可以利用大量学术实验室有物理机器人来测试算法。”
“你可以把它拿到并将其应用于适用于学习策略的任何工作量,例如芯片布局问题,”Majumdar说。“您可以将其作为Markovian游戏制订并应用加强学习解决方案。这种基于人口的工作的影响超出了物理机器人。“
PartNet增加了对3D数据集的部分层次理解
“英特尔关心的是不同的数据集,”他说Tripathi..“去年,我们认识了苏浩教授,他的实验室专注于计算机视觉,我们决定创建一个大规模的、细粒度的数据集。”
“坐在椅子上实际上非常复杂,”UC圣地亚哥教授说郝苏.“它可能不是面对着你,你需要拉着它的一只胳膊,然后你必须知道垫子在哪里,后面是什么。为了与一个物体互动,机器人必须了解它的各个部分。
“在机器人专家使用的大多数虚拟环境中,都缺乏复杂性和规模,”他说。“我们希望实现能够真正理解复杂几何和物理属性的人工智能。”
大多数现有的3D形状数据集在少量实例中或以非分层方式注释占组件或对象的部分。UC San Diego和Intel研究人员宣布PartNet,其中包括26,671个形状或物体点云的573,585个语义识别的子组件。
这些注释与灯具、门或椅子等24类日常物品相关联。就台灯而言,零件包括“灯罩”、“灯泡”和“拉链”。提出了细粒度分割、实例分割和层次分割的方法,分别对对象进行划分、零件之间的区分和零件类型的识别。
“不仅识别一个物体的身份,还能识别它的属性、部件、成员和部件的功能,这将极大地影响计算机视觉、物体识别和机器人运动领域,”苏浩说。“很长一段时间以来,计算机视觉和感知是一个从规划、控制和驱动分割开来的社区。伙伴网络可以帮助提供一个共同的基础设施。”
智能机器人的人类注释
要创建和注释数据集,Partnet研究人员使用分层部分模板并使用66人合作。
“他们建立了基于几何、物理和语义属性的知识,”郝苏说,“该项目可以追溯到2016年,我们建立在ShapeNet项目的3D模型上。使用基于浏览器的用户界面,注释器可以按照层次分类法将一个部分分割成更小的部分,或者将部分合并成更大的部分。标注之后,会有一个完整性检查或质量控制过程,因为我们仍然会发现人类之间的一些不一致。”
有了PartNet数据集,研究人员可以用对象——包括它们的组件和功能——构建大规模的模拟环境。这种模拟可以用来训练机器人如何与微波炉等物体互动。
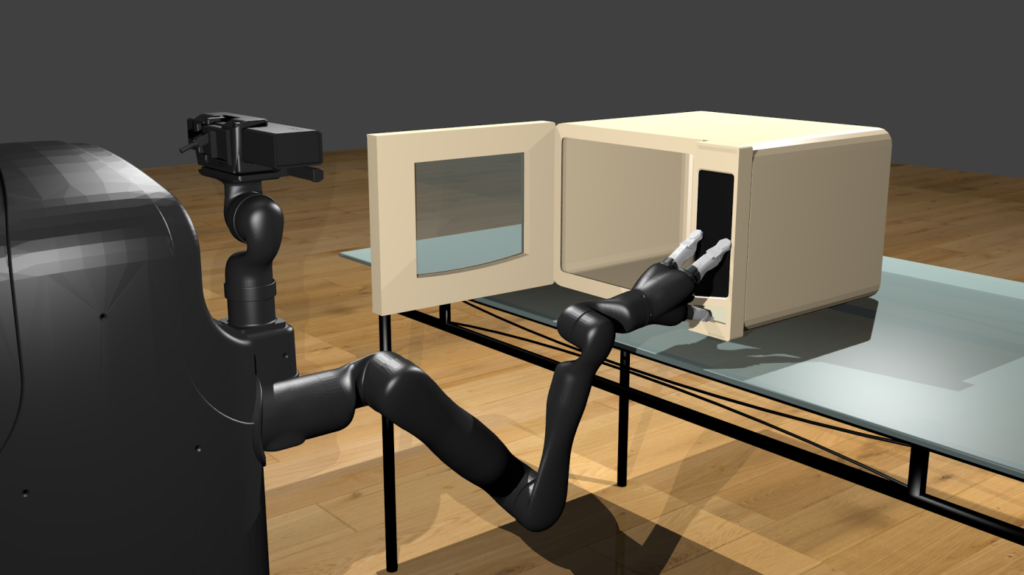
PartNet能够进行模拟,更好地训练机器人与日常物体进行交互。来源:英特尔
“任务感知抓取目前基于几何学,但许多机器人不知道部件,”郝苏说。“例如,它可能不知道抓住杯子的把手,所以它可能必须处理热容器。”
伙伴网是建立动态虚拟环境的第一步Kaichun Mo.他是斯坦福大学人工智能实验室(Stanford University AI Lab)的博士候选人研究论文.“要打开一扇上锁的门,机器人必须首先识别锁眼——这是一个具有挑战性的问题。”
“然后打开门,机器人必须了解锁定以解锁的国家变化,我们目前正在进行中,”他说。“最后,机器人必须弄清楚物理细节。需要多少力量?门是什么?它应该施加力量吗?“
“Partnet将是下一个注释的基础,即移动性和动态属性,”郝苏说。“我们收到了询问更多属性的电子邮件。有些公司拥有独特的数据,其他大学已经开始使用PartNet进行微调,以便在识别结果上进行它们的数据。“
“英特尔在加强学习中做了真正的开创性工作,”郝苏说。“这可以帮助国内机器人的进步,这将更好地照顾年轻人和老年人。它需要了解家中的所有对象。“
“虽然伙伴网络已经关闭,但我们欢迎国际合作伙伴的使用,”莫开春说可以在这里.
了下:AI•机器学习,机器人的报告,机器人技术•机器人抓手•末端执行器




告诉我们你的想法!