


一个优步自驾车击中并杀死了一个行人星期天晚上在亚利桑那州坦佩。初步调查正在进行中,但Tempe警方表示,这辆车在撞车时处于自治模式,旅行约40英里/小时,并没有显示任何放缓的迹象。
优步肯定有事故的录音,所以完整的故事最终会出来。优步的自驾车,如其他许多人,牢记冗余。这意味着如果一个传感器发生故障,另一个踢进作业。
显然没有发生在这里。优步的自动驾驶汽车,正如您在下面的图形中看到的,有多个传感器,可以在晚上检测行人。但是,警方再次说自驾驶驾驶汽车没有放缓的迹象。所以它看起来优雅从未看到49岁的Elaine Herzberg,他在穿越的人行横道外,他在街道上散步了她的自行车,当时她被击中。
如果有必要,汽车中有一个人的安全司机接管车轮。但这也没有发生。警方表示,44岁的Rafael Vasquez显示没有受损的迹象。
这是一个完整的系统故障吗?多次冗余失败了吗?当然只有时间才能告诉。自行车车专家布拉德·德普敦推测也许,这是不准备的优先案例。Templeton写道,与您通常看到的内容相比,“一个人走过非流行语的人是一个不寻常的事情。因此,优步的感知系统可能不可能识别和建模。这是模拟器中可能没有测试的东西。“
他继续,“注意,随着最先进的团队,他们正在做出非常广泛的所有变体测试,他们可以在模拟器中考虑这样的情况。因此,这应该是系统以前看到的东西,至少几乎是。“
工程师不能考虑每个可能的边缘情况,但这就是机器学习应该进入图片的地方。优步的自动驾驶汽车应该通过分析大量数据来学习如何在不可预见的情况下反应。无论发生这种事故如何发生,它都会在自动驾驶汽车规定周围点燃争议,特别是在没有人类安全驱动因素的情况下进行测试。
超级驾驶汽车的传感器
这是一个在优步自动驾驶沃尔沃XC90 SUV中使用的传感器设置。
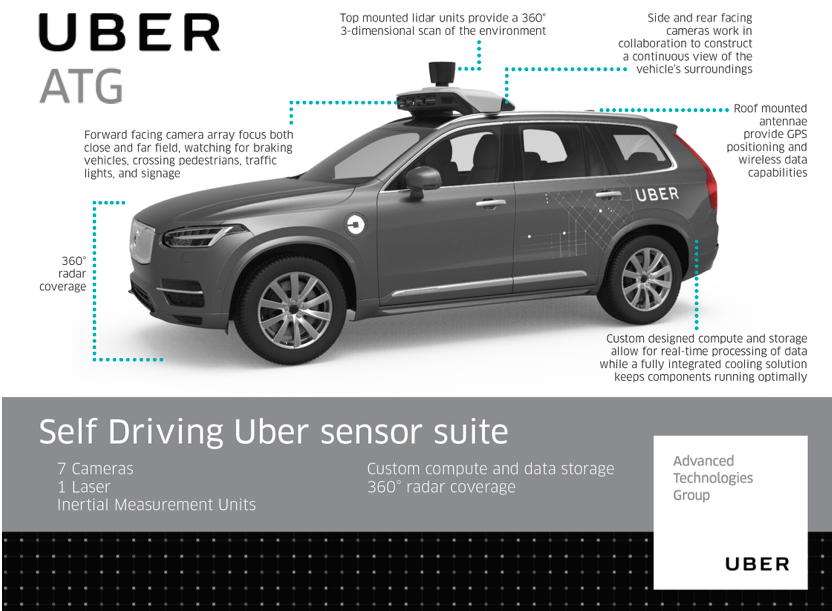
Uber自动驾驶沃尔沃XC90中的传感器套件,涉及致命事故。(信用:超级ATG)
激光器:光检测和测距(LIDAR)系统安装在超级驾驶汽车的顶部。这产生了360度,每秒多次汽车周围的3D图像。它以极高的速率反弹一个物体的激光,并测量激光所需的长度反射偏离该表面。LIDAR非常擅长检测静态和移动物体,日夜。LIDAR在雾,雨和雪等恶劣天气条件下有其局限性。
雷达:优步使用无线电检测和测距(雷达)对其周围环境的另一个360度视图。使用无线电波,雷达以特定频率发出检测信号,并等待接收该信号。这决定了汽车和障碍物所在的位置,并且在他们旅行的速度时。雷达对LiDar的天气不存在负面影响,但它不会像LIDAR一样准确地中继物体的大小和形状。
相机:根据优步,其自动驾驶汽车使用七个短距离和远程光学摄像头。面向前面的相机焦点靠近和远场,看着制动车辆,穿越行人,交通灯和标牌。侧面和后方的摄像机在合作中工作,以构建车辆周围环境的连续视图。
天线:屋顶上的天线提供GPS定位和无线数据功能。优步将其路由预先绘制到该区域的高分辨率3D地图。Uber的自动驾驶汽车然后比较他们所看到的内容所看到的内容。
人类安全司机:人类安全司机是在自动驱动系统失败的情况下的最后一系列防线。不幸的是,人类在这种情况下也失败了。现在正在驾驶汽车测试已经进行了一段时间,但有些州(包括亚利桑那州)和加利福尼亚包括在内的州,都是开始允许公司在方向盘后面的人身后测试自动驾驶汽车。
提交:汽车那机器人报告




告诉我们你的想法!