

通过科尔摩根高级系统和应用工程师赫尔利·吉尔
伺服电机惯性比影响整体机器效率,它们的使用随着伺服驱动技术的发展而发展。因此,现在最新的数字伺服驱动和反馈技术可以获得更高的惯性比,同时保持对目标速度和位置的稳定控制。这可以提高设计效率,特别是对于索引等动态应用程序。
在尖端应用中,设计电机驱动的机器以获得可能的最佳性能而不考虑运行成本是可以接受的。然而,大多数行业都需要能够以尽可能高的效率运行良好的机器。不幸的是,文章和其他出版物,参考伺服电机和驱动器尺寸往往错过这一点。

虽然机械系统的数学解决方案有很好的文档,但它们并不一定要考虑实际的机器功能(或要做的工作),也不考虑特定的控制能力(或限制),以帮助工程师选择最佳的电机、驱动器和反馈。但设计良好的机器可以大幅削减电力公用事业费用,因此有理由对每个机器轴进行更深入的分析。更重要的是,当大部分使用的能量用于驱动机器的负载时,总能耗会下降。这就意味着更低的总体扭矩要求,而且工程师们也可以选择更小、更便宜的电机。
适当的惯性比可获得较好的效率
高效的设计越来越受到环境和经济因素的重视,所以设计师应该着眼于为应用选择最佳的电机驱动反馈系统,同时牢记每种技术的优缺点。这降低了故障的风险(对风险管理很重要),使机器更实用,可用,竞争和销售。
在这篇文章中,我们解释了一个帮助工程师做到这一点的指导方针——价值系数,定义为基于一个系统或设备的一个或多个特征来表达设计有效性的数量。在这里,我们使用的优点是惯性比。基于惯性比的设计工作有助于工程师将动态高速机械的能量需求降到最低——无论轴是直接驱动的还是有机械动力传输装置的。
惯性比基础知识
伺服的惯性比或失配(缩写J_load:Jm)是什么?简单地说,惯性比有助于表达整体可控性和伺服控制不稳定的风险。对于所有闭环(伺服)应用,特别是动态应用,它是一个重要的数字。旋转伺服系统转动惯量比或失配的两项为:
1)荷载的总转动惯量J_load。在这里,惯性载荷是指从所有轴的组件(反映通过机构时,适用)和总和在电机的轴。
2)电机的转动惯量,这里用Jm表示。
惯性不匹配不是一个具体的数字,甚至不是每个应用的具体范围。也就是说,有一些比例范围,一般适用于特定的应用和机器设计。
想想有多少技术手册说理想惯性不匹配是1:1。嗯,这是最理想的不匹配,以最大限度地提高功率传递和最小化潜在的控制问题,而加速和减速的能量是平均分配的
J_load和Jm(其中J_load = Jm和
J_total = 2·J_load)。然而,最有效的动态应用最大限度地提高负载惯性加速度(在轴的稳定性、可控性、准确性和可重复性的范围内)。因此,对于固定的J_load,机器的最高效版本以尽可能低的Jm获得最大的加速度,而不是最小匹配的J_load。
这一优点的历史
当伺服驱动器第一次被开发时,它们是模拟的。设计师们用手调节伺服控制回路,在实验室里用示波器调节电阻和电容刻度盒。很难微调伺服控制回路,以客户特定的机构,因此驱动器制造商出售电机驱动组合与预置补偿(COMP),以获得轴的稳定,为大多数应用。制造商的COMP通常假设OEM的机器需要一个惯性不匹配J_load:Jm为1:1,因为这个比例具有最小的轴不稳定的可能性。

想象一个装有齿轮头的伺服马达驱动一个轴。齿轮马达在齿轮齿之间显示出反弹。在这里,一个标准的COMP必须保持电流、速度、位置和回路的稳定性,不管反射惯量如何——即使电机在驱动齿在被驱动齿之间转换时看到最大负载的总反射惯量,以及最小负载的总反射惯量。轴与假定的惯性错配(1:1)越接近,控制器在运行过程中越有可能保持轴的稳定。

这就是为什么多年来,驱动制造商设置COMPs来处理标准化的惯性不匹配,然后建议原始设备制造商制造他们的机床轴,以保持在这些惯性不匹配范围内。1:1的J_load:Jm不匹配(基于最大的功率传递方程)让设计师在电流和速度环路上构建具有简单增益调整的轴,并在适用时使用外部位置环路。这样的COMPs在J_load:Jm不匹配的机器上表现良好,从1:1到3:1,甚至5:1。一些应用程序甚至可以使用标准的COMPs,与机器的不匹配高达8:1甚至10:1。但除此之外,机器还需要特殊补偿——在过去,制造商必须编写定制的COMPs来适应更高的惯性不匹配。
尽管存在这些限制,但标准的惯性不匹配与有用的惯性范围可以让设计师使用伺服系统来获得机器的稳定性,并防止制造商和原始设备制造商因为不稳定问题而发疯。
大多数模拟驱动器制造商在标准comps中使用1:1的惯性(最大功率传递)比,尽管他们建议的J_load:Jm惯性不匹配范围有时会根据他们的经验、市场和驱动器的控制回路传递功能能力而变化。3:1 ~ 5:1的惯性比是常见的,1:1 ~ 3:1的惯性比在许多高速分度应用中是典型的。无论过去还是现在,将惯性不匹配的优势系数调整为1:1,都是驱动制造商最大化客户满意度、以最小的控制不稳定风险销售复杂产品的一种方法。甚至大多数步进电机制造商都在宣传这种功能——吹捧他们的驱动器是使用特定惯性比的简单组件。只要应用程序的负载惯性和摩擦接近(或小于)已发布的功能,这些开环步进系统的一切工作都很好。
这个问题?当应用程序被固定在一个不匹配的地方时,它们就无法高效地执行。事实上,在最复杂的系统中,不匹配会随着轴的机电一体化和动力学变化而变化——包括摩擦、摩擦、外部载荷、反弹、顺应性和刚度;负载、机构惯量、反馈分辨率、负载与电机之间的运动体数、设计固有频率;电机的驱动PWM/SVM和更新速率;和控制器的单独更新速率,适用时。
在惯性不匹配J_load:Jm计算中很少考虑这些因素,因为考虑它们会使控制复杂化,而且这些因素在过去通常不会被考虑。但现在这种情况正在改变,随着控制技术的日益成熟,oem现在可以选择制造性能和效率更高的机器。
新的惯性比灵活性能力
当伺服电机的数字驱动器首次出现在市场上时,它们极大地提高了补偿的灵活性、滤波和运动轮廓编程的能力。即便如此,对传统的择优录取(惰性错配)的依赖并没有改变。此外,早期的数字伺服驱动器并不总是适合取代模拟驱动器。

然而,今天的数字伺服驱动器有更快的处理器(fpga),更快的更新速度,和增强的补偿方法和模型。更重要的是,在大多数应用中,每转超过221至227位的更高分辨率反馈设备可以使伺服系统响应更快。例如,曾经反馈分辨率为每机械转212到216次的轴,现在可以在以前的时间或位移的一小部分内获得相同的计数。这使得更高的控制回路增益和更高的带宽能够在可能的不稳定发生之前捕捉和控制它们。
今天最新的伺服驱动器与机电一体化设计很好地结合在一起,并具有良好的控制能力,工程师可以假设J_load:Jm的影响是最小的,即使是动态应用。这使得工程师可以设置惯性比的范围,以最大化能源效率和最小化不稳定性(在合理范围内,并保持良好的风险管理),即使是对于高速索引类型的应用程序。
潜在的节省能源
有时,终端用户会加快生产过程以获得更高的吞吐量,或加快机器的速度以获得更快的响应。在这里,机器必须做出更快的动作,并对所有的命令和干扰做出反应,同时保持产品的输出质量。
考虑一个产品被机械加工或以其他方式加工的工厂。有时,加快一个特定的过程是不可能的,所以工厂工程师试图加快物料搬运工位的速度,而不是加快搬运工位的轴。这增加了轴在加速和减速(从基准生产速度)期间的峰值马力,通过新的增加的速度和扭矩的乘积。
为了说明这一点,让我们探讨一下这在高速索引应用中是如何工作的,以及对于最低功率需求,以节能与惯性比的百分比表示的惯性比最佳点是什么。
动态索引应用程序示例
考虑几种高速分度的应用,直接驱动和机械优势(在这种情况下是带),在不同的行业和市场完成完全不同的工作,低摩擦和没有外部负载。假设我们固定了处理时间,以迫使机器在更短的时间内做出特定的动作(就像在现实世界中经常看到的那样)。对于三种情况,我们设置指标次数,峰值扭矩T(peak)约为1.6 x T_rms;约2.0 x T_rms;和2.4 x T_rms。
一旦我们计算每个运动剖面的最大遍历转速N和等效速度N_rms,它们对于特定的运动剖面是恒定的,而不考虑惯性错配或比例。三种情况下的能源节约比例基本相等。这是因为每一种情况下理论上可能的最大功耗节省都在几个百分点之内。为了简化我们下一轮的计算,我们只考虑第二种情况,即T(peak) = 2.0 x T_rms。
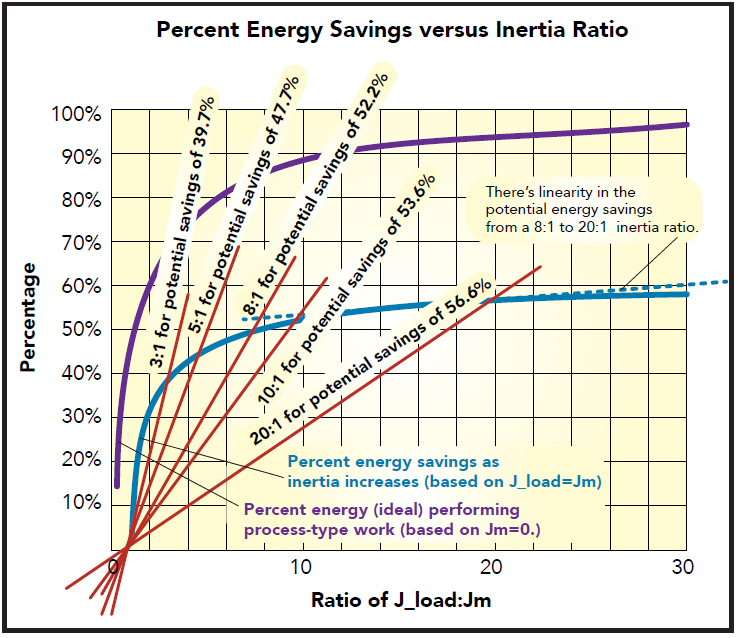
请注意,如果惯性比J_load:Jm超过基线1:1的比例,则实际节能潜力约为39.7%,如图所示。节能百分比与惯性比.再来看看标题为,节能与惯性比的关系,并注意到5:1的比例如何使实际节能超过47.6%——约为理论最大可用节能的80%。同样地,8比1的比例使实际节能超过53.6%,相当于理论最大节能的87.5%——相对于基准的1比1惯性错配,这是相当可观的节能。
重新考虑效率与J_load:Jm比率的关系。确定一个理想的惯性比或比例范围以最大限度地节省能源是非常主观的,但用户通常希望尽可能地节省能源。所以说,我们的目标是获得80%到90%的能源节省,最大可达95%以上(在图表的第四列)~60%(在图表的第三列)。这意味着对于大多数动态应用程序,目标J_load:Jm范围是5:1到20:1。
90 - 95%的节能效果更好,也就是说惯性比在10:1到20:1之间。但即使是8:1的比例,也显示出节省能源的潜力是理论最大可用能源的87.5%。如今,许多新的电机驱动系统可以在不稳定的附加风险很小的情况下完成这些动态应用。
这些节能也直接影响电机尺寸/选择和成本,因为导线速度(N)和N_rms是由运动轮廓确定的。因此,所需的应用扭矩(T_rms)更小,所以机器设计师可以使用更小(和更便宜)的电机,如果它是可用的。
计算说明
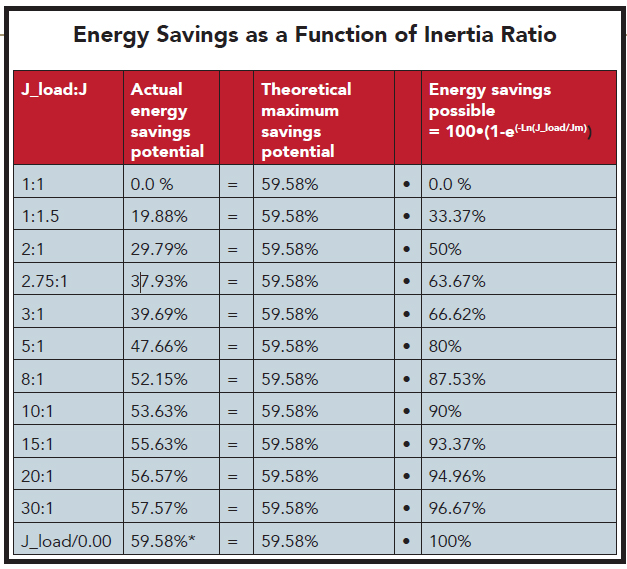
重新考虑标题为,节能百分比与惯性比.任何惯性比(相对于1:1)实际节省的能量作为理论最大节省的百分比等于理论最大节省潜力(Jm = 0)*(1-e(-ln(J_load / Jm)),其中理论最大节约潜力(Jm = 0) = 59.58%。因此,为了以8:1的比例(而不是1:1)获得实际节能潜力的百分比,我们使用:
实际节能潜力(比例为8:1)= 59.58%*(1-e(ln (8))= 59.58%*0.875 = 52.1%,与实际运动剖面计算结果相同。
类似地,如果我们在一个轴上有一个2:1的惯性想要估计实际的能源节省,如果我们把高速索引器的惯性比调到15:1,我们可以从标题为,节能与惯性比的关系.使用图表的第二列可以得到:
100 * (55.63%-29.79%)/(100-29.79) =
100 * 25.84/70.21 =
节省36.8%的能源。
同样的图表显示,从1.5到15:1的比例可以节省44.6%的能源。
相比之下,当惯性比达到3:1时,实际增加的能量百分比与现在的10:1的比率(例如,由于产品过时)相比,大致如下图第二列所示:
100 * (53.63%-39.69%)/(100-53.63) =
100 * 13.94/46.37 =
30%的能量增加。
下面是最后一个练习来说明这一点。假设我们有一个机械上有利的机构(一个齿轮马达),其初始目标是10:1的惯性比- jratio。则传动比为:
因此,如果Jload(为了可读性,在本文的其他地方列出了J_load)等于100公斤-厘米2Jm为1.0 kg-cm2,则传动比为:

然后,设计人员应选择具有足够的转速和转矩能力(T_rms, N_rms, T_peak, N_max/traverse)以及Jratio范围的电机。然后,设计师应微调数字和电机的选择,以最终计算和确定应用程序的设计。
节约成本汇总
正确选择伺服控制轴的电机驱动反馈可能是机器设计师为降低用户操作能量成本所能做出的最重要的节省因素。今天的数字伺服驱动技术拥有比几年前更高的反馈分辨率,由于更高的整体带宽能力,这是为了稳定和可重复的轴控制。再加上良好的机电一体化设计(与每个机器轴所做的工作相协调),让设计师显著地提高了J_load:Jm的优点因数……特别是与十多年前相比。
简而言之,当惯性比接近1:1时,机器的性能和轴的可控性(易于伺服控制回路调谐)通常会提高,但更高的惯性比可以让设计师降低制造、操作甚至机器的成本。
因为今天的产品和伺服控制能力很大程度上解决了控制稳定性的问题,设计师可以专注于优化惯性比,以获得更高的能源效率。更具体地说,设计师可以精确地确定惯性比的范围,以获得最有效的电力使用……通常是8:1到20:1的范围,在某些应用中,惯性比甚至更高。
举例来说:大多数机械优势的索引应用可以使用今天的先进伺服驱动器搭配高分辨率反馈和低惯性伺服电机来获得这些能源节省。然而,许多高速索引器的J_load要小得多,无论是否具有机械优势。这并不是说直接驱动不能有更高的惯性比。事实上,它可以通过数量级,通常只受限于驱动负载的钢构件的顺应性、机架刚度、反馈分辨率和可用的系统带宽。然而,许多高速分度器应用的惯性负载J_load要低得多,经常接近今天电机的转子惯性Jm的可比所需扭矩。
Kollmorgen
www.kollmorgen.com
![]()
了下:运动控制技巧



