

有三个特征表明伺服系统何时进行了适当的调整:响应时间、稳定时间和超调量。响应时间是系统达到目标值的指定百分比所需的时间,而设定时间是目标值在指定百分比内设定所需的时间。超调是指系统超出目标值的程度。伺服调优的目标是最小化响应时间、稳定时间和超调量。
不管响应和稳定时间如何,一个不能达到位置、速度或扭矩指定值的系统——也就是说,一个过冲或过冲的系统——并不是特别有用。系统的阻尼比指示系统是否可能超调或欠调。一个过阻尼的系统将低于它的目标值。换句话说,过阻尼系统的上升和下降时间长,达不到目标值。相反,欠阻尼系统将超过其目标值。欠阻尼系统常产生振荡,振荡上升时间短,衰减时间长。
过阻尼系统无法达到目标值,而欠阻尼系统超过目标值。
图片来源:Adept Technology, Inc.
当调优PID伺服回路,增加积分增益(K我)可以改善系统响应,但由于积分增益在移动结束时随着时间的推移而增加,它可能导致超调和振荡。但如果积分增益过低,系统对变化的响应就会变慢。
导数增益(K)d)与积分增益一起工作,以减少超调并为系统提供阻尼,同时将响应时间和误差保持在可接受的水平。但是导数增益实际上降低了系统响应,所以Kd值过高将降低响应时间并导致系统振荡。
解决超调(或欠调)的另一种方法是使用级联位置-速度环前馈增益.与PID增益相反,PID增益无功,基于已经发生的误差,前馈增益为积极主动的,预测实现零错误所需的命令,并将它们注入控制循环。
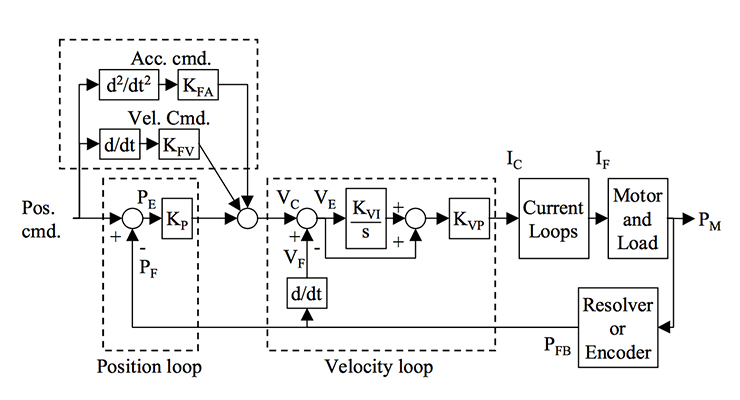
具有速度前馈(K艘渔船)和加速度前馈(K足总).
图片来源:kolmorgen
前馈增益有两种类型:速度前馈和加速度前馈。速度前馈使跟踪误差最小化,提高了匀速运动阶段的响应时间。它通过将位置的导数(即速度)乘以速度前馈增益来实现这一点。速度前馈在减小误差和提高响应的同时,也有引起超调的缺点。
加速度前馈通过将加速度前馈增益添加到位置命令的二阶导数(即加速度)中,最大限度地减小了运动的加速和减速阶段的跟踪误差。加速度前馈消除了速度前馈引起的超调。由于它在控制回路之外运行(速度前馈也是如此),加速度前馈不会影响伺服稳定性。将速度前馈和加速度前馈与标准PID伺服控制相结合,既能实现快速响应,又能实现最小误差,不会产生超调。
了下:运动控制技巧,运动控制•电机控制




告诉我们你的想法!