


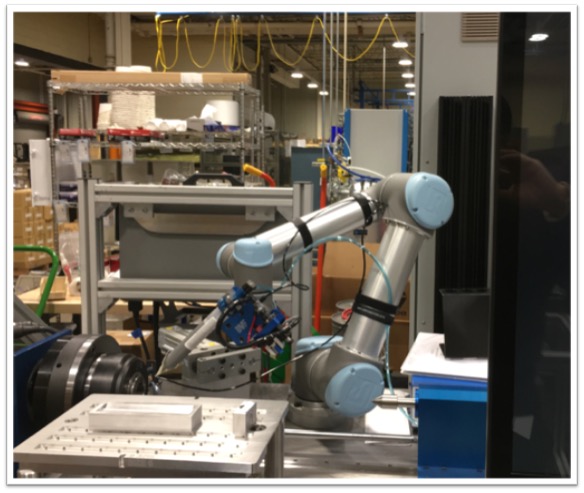
UR + SFK Liftkit Palletization是应用程序对机器人的环境影响的应用程序。资料来源:通用机器人
从汽车制造到计算机,通信和消费电子的“3CS”,工业自动化的需求仍然升级。与传统生产线中的专用设备相比,机器人提供卓越的操作灵活性和能力。它们特别适用于多物种和小批量生产,以便快速响应移位市场和消费者需求。
自1916年以来,科尔摩根公司(Kollmorgen Corp.)一直为机械制造商供货。今天,该公司表示,其运动系统和组件的知识,自动引导车辆软件,以及行业领先的质量,使机器制造商具有市场优势。Kollmorgen.补充说,它在集成标准和定制产品中的专业知识提供了在性能,可靠性和易用性中无与伦比的系统。
Kollmorgen的工程人员概述了影响工业机器人关节性能和寿命的主要环境因素。此功能最初是持续的运动控制提示,一个兄弟姐妹网站机器人的报告.
回归本源
要审查,工业机器人是自动控制的可编程多用途操纵器,可在三个或更多轴中移动负载。执行器和控制技术的显着进展使得复杂的模块化机器人关节的演变。模块化机器人关节标准化尚未与Myriad其他零件和系统相互作用。
工业机器人越来越多地用于运动控制行业,以最大限度地提高生产效率和吞吐量。资料来源:运动控制提示
模块化允许在设计和机器功能,适应性和易于组装方面进行多功能性。集成的机电调整模块化关节优于传统的机器人,以及更高的功率密度,动态性能和可靠性以及较低的重量。
一个警告是,工业机器人可以产生重大的前期投资。在考虑机器人替代昂贵的人工劳动力时,决定性因素是资本投资和机器人服务生活中的投资期。快速回报和长期使用寿命最大化回报。

无框PM电机是许多机器人关节设计的顶级电机选择。它们提供紧凑性,最大限度地减轻整体系统惯性的重量 - 帮助制造机器人臂钳,更可靠。资料来源:运动控制提示
某些运动组件制造商在机器人行业中使用的伺服运动组件中良好。OEM协作机器人(Cobot)具有光有效载荷的设计是通过包含一个或多个模块化机器人关节而优化的。一些模块化机器人关节整合无框架扭矩电机采用交流永磁(PMAC)伺服电机的形式,设计简单安全。精心的工程意味着一些无框的电机优化以遵守空间或重量限制或性能和可靠性要求。
现在让我们概述各种环境因素,影响工业机器人关节的寿命和性能。
热环境影响降低了机器人部件的寿命
高温可以降低工业机器人的寿命。例如,机电机器人联合模块包含无框架电机,伺服驱动器,专用齿轮系统,制动器,编码器或旋转变压器,扭矩传感器,连接电缆等,在一个紧凑的外壳中。
正常操作在该壳体内产生热量 - 如果适用 - 以及其他电气元件,主要来自传动装置,电动机绕组和制动卷。如果使用菌株波动齿轮,则传动装置是最重要的环境热源。由于齿轮网摩擦,粘性润滑剂剪切摩擦,粘性润滑剂剪切摩擦和能量贡献的总功率损失的高达30%的贡献能够反复扭曲金属柔性纤维系数。无效的散热会导致机器人变热并表现出的性能降低。
在机器人关节中常见的:应变波传动装置
机器人接头的输出轴通常以10至40rpm旋转。电动机通常在机器人关节运动期间以1,000至4,000rpm旋转,以便短脉冲。因此,传动装置降低速度并增加输出处的加速扭矩,相对于其尺寸占地面积(每单位容积的扭矩)和特定扭矩(每单位质量扭矩)。
应变波齿轮在机器人应用中是必不可少的,但并非没有挑战。资料来源:运动控制提示
应变波动齿轮机构提供了独特的优势,可证明其在工业应用和机器人中的使用。它们包括在单级,处于或接近零间隙和简单的结构,精确的扭矩传递和高定位精度和可重复性的高速比。
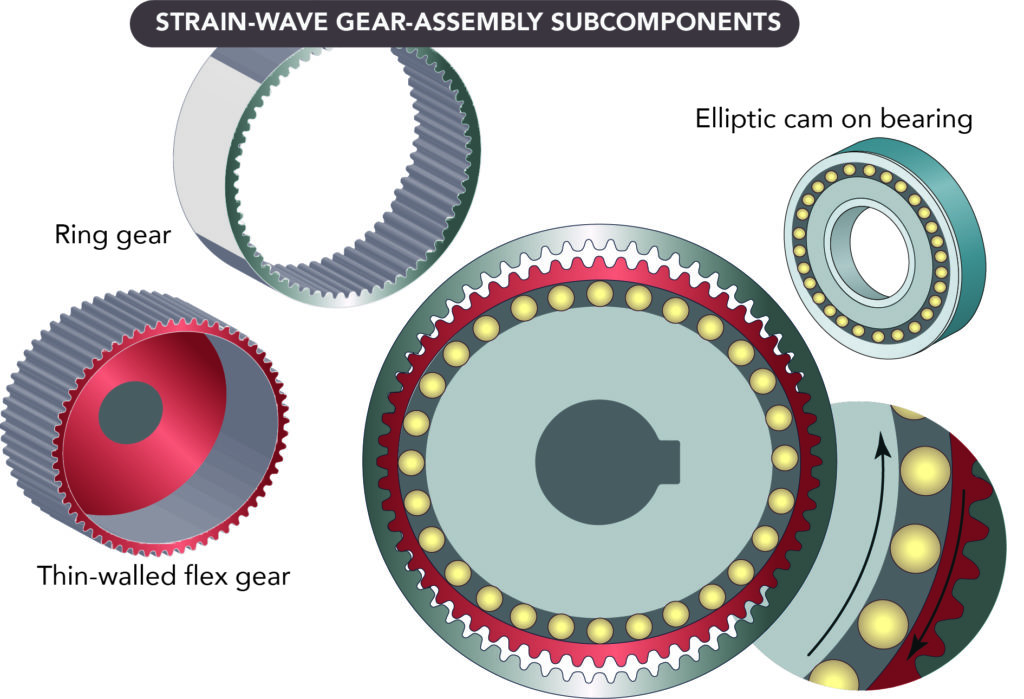
应变波齿轮传动装置包括椭圆形波发生器,柔性件和圆形样条。Flexspline是寿命限制的子组件。在操作期间,从椭圆形波发生器的旋转期间,不断变化的弹性变形量 - 并且必须以最小的角度偏转旋转。因此,Flexspline必须在径向方向上是柔性的,但在切向方向上坚硬,以精确地传递旋转运动。
应变波传动装置中的功率损耗是由于各种机制, 包含:
- 由于齿轮啮合而导致的摩擦损失在三颗牙齿啮合阶段的Flexspline齿和刚性圆形样条之间 - 接合,接合和接合。与传统的齿轮不同,由于相应的齿在接合中的相应齿之间的小相移,齿在污渍波机构中的齿移动主要是滑动的。在牙齿之间滑动导致能量损失并将组装加热到平衡60到70°C.
- 由于的分子摩擦损失润滑剂中的粘性摩擦.
- 轴承摩擦损失在交叉滚子轴承,波发生器轴承,和其他轴承。
- 机械损失由于柔性折平的扭转和径向变形,由于周期性重复的弹性应变能量。
其中一些功率损耗受环境工作温度的强烈影响。
传统的齿轮系统通常表现出一定程度的间隙。间隙降低了齿轮系统的准确性,但为润滑和热膨胀提供空间。考虑到在高温下固有地具有几乎零间隙的应变波齿轮传动装置,其齿轮元件上的热膨胀可以促进啮合齿轮之间的干涉 - 并增加齿接触压力和啮合摩擦。
应变波齿轮的磨损特性在很大程度上取决于润滑剂的条件,又受到工作温度的影响。过高的温度可以促使润滑膜的击穿,这又允许在齿轮齿接触表面上磨损损坏。
应变波齿轮传动的效率与负载百分位(负载转矩与允许平均转矩)和允许工作温度成正比,与输入转速(齿轮比)成反比。最高温度额定值为50至70°C,取决于制造商和润滑剂额定值。
电动制动器是另一个热源
电动制动器在工业机器人上很常见。这些应用中的制动器通常包括具有机械弹簧机构的电磁感应线圈,以在从线圈移除时接合保持摩擦(干扰)状态。在电动机运动期间发电的制动线圈产生热量。
线圈电阻随线圈电阻R的增大而增大C在温度下,随着操作温度T与环境温度T之间的温度差异而变化。一种定义为:

其中α =材料温度系数(对于铜磁性线α = 0.00393 /°C)和T.一种=环境温度,并与:
![]() =线圈在环境温度下的电阻......因此,如果温度上升30°C以上,环境温度高于环境温度,螺旋电阻增加了12%。
=线圈在环境温度下的电阻......因此,如果温度上升30°C以上,环境温度高于环境温度,螺旋电阻增加了12%。
环境温度和无框架电机
无框架电机适合尺寸和重量是顶级设计目标的应用。与采用的电机相比,这种电机类型可以提供最终用户的商业和技术竞争优势 - 包括高扭矩密度,增强的散热能力,以及定制设计的灵活性。
将无框架(定子和转子)电机直接集成到已经支撑齿轮组件的轴承上,最大限度地减少了整体机器人关节尺寸并消除了冗余部件。后者可以包括额外的轴承,以支撑转子,单独的轴和与电动机轴和齿轮组波发生器之间的联接器。
电机制造商目录中列出的额定连续转矩值是基于设定的环境温度-通常为40°c。当实际环境温度超过额定值时,电机性能恶化,在低速接近失速时,其输出转矩降低:

在哪里T.马克斯=最大电机绕组温度,T.一种=额定环境温度,T.A,R.=真实环境温度,T.C=额定连续(低速)扭矩和T.c, d=实际环境温度下降级扭矩。所以,有T.马克斯= 80°C,T一种= 40°C,和T.A,R.= 60℃时,降额转矩为原始连续转矩的70.7%。
在低速时,无框架电动机电源损耗由电机绕组中的基金损耗主导。由于绕组阻力导致的功率损耗P.L.与电流有关一世电阻电阻rW.:

如R.c、T与制动线圈相关的前面讨论的等式,更高的温度直接导致较高的绕组阻力R.W.......反过来,机器人关节臂中的功率损耗更高。
扭矩排放式公式不会占非 -一世2R.电机损耗如铁损失。由于这些铁损耗随着速度的函数而增加,因此扭矩降低将比该计算预测更加明显。
电机芯中的铁损是电机磁路的基本电气频率和磁通密度水平的函数。电动机的极计数决定了定子芯和永磁体的基部频率和设计设定了磁通密度水平。特别地,涡流铁损是基本频率平方和磁通密度平方的函数。
机器人应用的运行速度是无框架电动机的电磁设计中的关键因素,因为选择的电机杆计数和定子核心的设计决定了平衡一世2R.和铁损失。优化的电磁设计导致机器人运行速度范围内的最佳电机效率。
机器人传感器对热敏敏感
机器人使用许多传感器 - 包括编码器,拆分器和扭矩传感器。这些传感器的关键特性是它们对环境温度的敏感性。对于光学编码器,温度的增加导致LED光输出的减少。热膨胀也会影响光学编码器性能。
实际上,热膨胀可以在一些情况下将盘和源(检测器)之间的气隙缩小0.020。(0.51毫米)。这种热膨胀的极端实例可以使子组件接触并导致编码器损坏或甚至灾难性的失败.对于磁性编码器,磁轮的热膨胀和收缩可以改变磁极的间距,从而改变输出。
伺服驱动器和其他电子元件
伺服驱动是各种机器人的关键,包括合作机器人、工业铰接机器人和医疗机器人。但在高温下,电子元件的故障率急剧上升。阿伦尼乌斯定律指出,工作温度高于额定温度每增加10°C,预期寿命将减半。
作为电噪声的主要源之一,热噪声由导体内的电子密度中的热噪声产生,因此总是存在于电子电路中。它高度取决于温度 - 换句话说,温度越高,热噪声水平越高。降低热噪声内容的唯一方法是降低操作的温度。
在机器人关节中润滑
润滑对电机和应变波齿轮传动的性能产生了重大影响。几种轴承类型用于机器人 - 交叉滚子轴承,波发生器轴承和常规深沟球轴承。这些轴承由矿物油基润滑脂润滑。
当然,轴承摩擦受几种因素的影响 - 包括温度,速度,负荷,润滑剂性能和环境条件。温度变化导致显着的润滑脂粘度和分子摩擦变化。冷可显着降低油脂的油释放特性,导致润滑不足 - 磨损潜力和系统故障。
作为比较,高温可以沉重或裂成油分子成较小的分子以降低粘度。这可能会诱导轴承漏油。事实上,高温也可以触发另外两个润滑脂衰竭机制:
油氧化可以导致油粘度增加,沉积物和形成保护性润滑膜的能力。润滑脂独特的第二种故障机制是增稠剂保持油相的衰弱能力。在极端条件下,后者可以诱导永久性润滑油。
根据经验,温度每变化10°C,化学反应(包括氧化和热降解)的速率就会变化2倍。这意味着温度升高10°C,反应速度就会加倍,预期寿命减半。随着温度升高,润滑脂失效模式会迅速增加。
对机器人的恶劣环境影响
某些类型的工业机器人旨在在恶劣的环境条件下运行,如喷涂机器人,焊接机器人,抛光机器人和研磨机器人。这种极端条件如潮湿或泥泞的地形,灰尘,湿度,振动和休克,腐蚀,毒性条件(如辐射)等可能会显着影响机器人的性能和生活。
不同外观涂层、材料和密封件的工业机器人承受这种环境条件的能力不同。大多数机器人到达终端用户时已经密封好了。但在长时间的使用后,热循环可能会导致压力变化和密封失效——对于进入路径和允许外部碎片进入机器人内部的地方来说。
光学编码器通过污染严重损害的光电元件(包括细间距尺度,LED和光电探测器)检测旋转运动。暴露于灰尘,污垢,水或油可以随着时间的推移导致部分或完全的编码器失效。如果光盘裂缝或碎屑的显着振动或震动的光学编码器也会失败 - 尤其是使用玻璃盘的那些。
轴承对污染也敏感。进入轴承的污垢,灰尘和其他异物可以造成划痕,凹坑和滚道表面上的研磨 - 以及过早损坏。水分可以通过几种方式降解轴承。暴露于水分的轴承可能腐蚀或在其暴露的表面上蚀刻或蚀刻,用于腐蚀的局部斑点。这种腐蚀模式又为过度的噪音,无计划的间隙和腐蚀区域的腐蚀疲劳。
所有其他机器人部件,从电动机到电子元件,可以在暴露于环境因素时腐蚀。集成在机器人关节中的伺服驱动器的小型化设计在电子元件之间大大降低了空间,使其更容易集成到机器人中。
但这种设计也提高了腐蚀设置中曝光的风险。在实践中,在机器人的制造,装配,运输和存储的各个阶段以及机器人的各个阶段,以及机器人的整个生命周期中可能会发生腐蚀,以及现场操作.
![]()
机器人的报告已经推出了这一点医疗机器人工程论坛,将于加利福尼亚州圣克拉拉的12月9日至10日。会议和世博会侧重于改善下一代医疗机器人的设计,开发和制造。了解有关医疗保健机器人工程论坛的更多信息.
运行过程中装载和振动
机器人的有效载荷和整体系统惯性影响着机器人的动态特性和位置控制精度。机器人的有效载荷是指机器人能够举起的重量,并且超出其自身的结构质量。当机器人承受很高的负载时,传动装置的齿可能会发生断裂。事实上,齿断裂往往是由机械过载超过齿轮材料的抗拉强度造成的。
整体系统惯性是负载惯量和机器人惯性的总和。它在旋转动力学中起着关键作用,并且代表了装载物体和机器人抵抗运动变化的趋势 - 即速度和方向。更高的系统惯性通常用于降低定位控制精度。也就是说,今天具有高分辨率反馈设备的最新高带宽驱动技术,最大限度地减少了许多这些影响和局限性。
根据其位置,方向和移动速度,机器人臂在操作中受到各种外部载荷和惯性力。当机器人执行某些任务时 - 例如携带有效载荷超过其发布的评级,执行快速演习和在非结构化环境中的大型力或时刻 - 机器人可能失去其动态平衡和运动稳定性。
在机器人体验到可接受的有效载荷但是一个非常高的惯性的情况下,它可能导致机器人缓慢加速,而不是正常工作,甚至使机器人无法制作命令移动。因此,安全的机器人操作取决于仔细考虑有效载荷(惯性)和有效接触力控制。
应变波齿轮可以具有若干类型的故障模式。Flexspline的疲劳骨折是最常见的失效模式.在应变波齿轮齿轮上的测试表明,早在400万个输入转旋转(对于3,000 rpm运行的电机相当于22.2服务时间),牙齿曲线完全被击穿并损坏了柔性孔牙齿的整个宽度 - 以及大多数圆形花键的宽度 - 来自操作不当.更重要的是,应变波动齿轮件在其输出扭矩中表现出高频振荡(扭矩波动)。这主要是齿轮啮合振动。
每个机器人系统都有其自身的谐振频率,在此时发生振动。对于旋转激励振动,谐振被称为临界速度。最终用户必须避免在固有谐振频率附近的操作机器人。
工业机器人经常在复杂的环境中运行,同时与人工互动并进行各种各样的任务。事实上,动态稳定性是影响机器人性能和工作场所安全的最关键因素之一,特别是对于具有大有效载荷,宽移动范围和高移动速度的机器人。
支持本文的参考文献:
[1] Schafer,I.等。al。(2005)。空间润滑与谐波传动性能.第11届ESMATS研讨会,第11届综合作品。65-72,瑞士卢塞恩
[2] Kircanski,N. M.和Goldenberg,A. A. 1997。基于谐波驱动和扭矩传感器的机器人关节非线性刚度、迟滞和摩擦效应的实验研究.国际机关。机器人研究学报16(2):214-230。
[3] Dynapar:温度和湿度如何影响编码器性能.
[4] Bilgin,B.,Sathyan,A.(2014)。电机基础,在先进的电动车辆(由Ali Emadi编辑)。CRC按:Boca Raton,FLA。
[5]埃克森美孚公司2012年:润滑脂基础知识.
[6]洛基,A.和Kakitis,A. 2012。评估影响Greenhouses机器人的环境因素。第11届国际会议论文集。科学会议-农村发展工程,pp.151-156。果冻,拉脱维亚
[7] Schafer,I,Bourlier P,Hantschack,F,Roberts,E. W.,Lewis,S. D,Forster,D. J.等人。2005年。空间润滑与谐波传动齿轮性能.第11届ESMATS研讨会论文集,65-72页。瑞士卢塞恩
[8] Johnson,M. R.,Gehling,R.和Head,R. 2006。火星侦察轨道飞行器双轴万向节验证过程中谐波齿轮失效.38航空航天机制研讨会的诉讼程序。威廉斯堡,VA。
[9] Bhadeshia,H. K. D. H. H. 2016。防止钢筋脆化钢.ISIJ INTL。56(1):24-36。
提交:机器人的报告那编码器•光学那电机(直接驱动)+无框架电机那机器人•机器人夹具•终点效果




告诉我们你的想法!