

可口可乐和百事可乐。耐克和阿迪达斯。伟大的产品创新不会没有争论,当涉及的产品或公司密切一致时更是如此。随着对自动驾驶汽车传感器未来发展的讨论不断深入,围绕技术的讨论也越来越激烈。
最近的一次突出事件发生在特斯拉4月的“自治日”我们听到了对该行业的广泛主张,其中有一个关键的讨论点——激光雷达vs.雷达。
激光雷达的工作原理
汽车新闻每天讨论的话题是什么是LiDAR和雷达,更重要的是,它们是做什么的?它们对自动驾驶又意味着什么?实际上,它们都是传感器,但技术截然不同。
目前,大多数自动驾驶汽车传感器套件使用两到三种类型的传感器:相机、雷达和在某些(更昂贵的)情况下的激光雷达。之所以使用几种技术,是因为每一种技术都有长处和短处,这些组合又能相辅相成。单独使用时,没有一个传感器是完全可靠的。
有时一辆自动驾驶汽车可以包括十几个以上的摄像头。虽然它们的分辨率很高,能够清楚地看到细节,但摄像头和天气不会混合,这对大多数司机和车辆来说是至关重要的。相机所提供的清晰度组件是LiDAR和雷达所缺乏的,但它们仍然不够可靠。
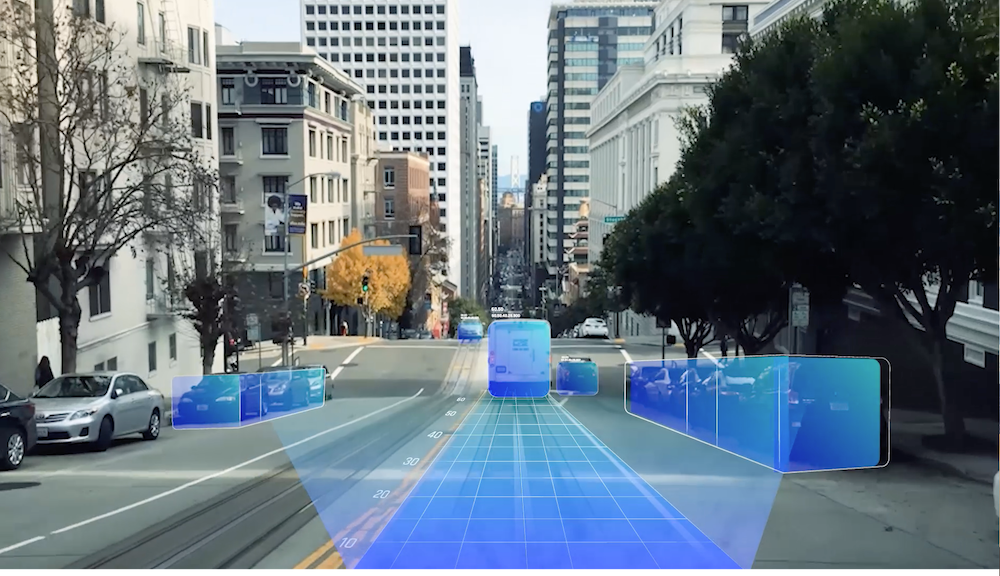
激光雷达发射快速的激光信号,从他们遇到的障碍物上反弹回来。一旦信号反弹,传感器就会收集信号反弹所需的时间量,以确定它所处的位置与前方可能遇到的障碍物之间的距离。和相机一样,LiDAR也会受到天气条件的限制,而价格点已经被证明是创造一款负担得起的大众市场产品的一个问题。市场上的激光雷达系统单就技术而言,起售价在1000美元左右到7.5万美元以上。
雷达的工作原理
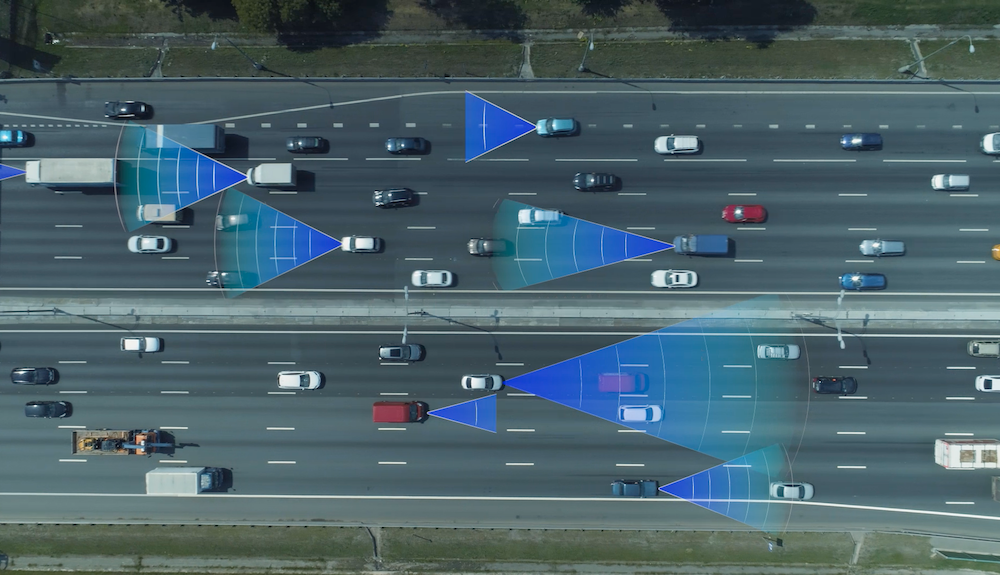
雷达的主要区别在于它使用无线电波而不是激光来感知物体。这使得雷达能够直接测量周围物体的速度,在汽车环境中提供了关键的优势。激光雷达系统需要依靠非常复杂的分析才能达到同样的结果。此外,当雷达波在空气中传播时,与光波相比,损失的能量更少,这意味着雷达可以在更远的距离上工作。雷达也已经在飞机和战列舰上用于强大的军事目的很多年了。
雷达在所有天气和照明条件下保持功能。然而,该技术传统上受到低分辨率的限制,这一缺点使雷达容易受到假警报的影响,无法识别静止的物体。直到现在,也就是这样。近年来,这项技术已经发展到高分辨率的能力。
Arbe的雷达技术克服了分辨率的限制,开发了一种具有超高分辨率功能的雷达,可以感知四维环境:
- 距离
- 水平和垂直定位
- 速度
这一功能可以将雷达从辅助角色重新定位为自动驾驶汽车传感器套件的骨干。
针对市场需求
随着自动驾驶行业的不断发展,以及对话的不断发展,传感器公司正在为汽车自动驾驶革命铺平道路,并帮助重新定义道路安全。自动驾驶汽车不再只是对未来的展望,它们已经在塑造汽车行业,可能很快就会出现在我们的道路上。
然而,为了使这些愿景成为现实,我们必须现实。通过高分辨率雷达和摄像头的结合,可以实现成本效益高的自动驾驶,提供了一个安全可靠的解决方案。

关于作者
Kobi Marenko是Arbe,是雷达革命的领军企业,它将让自动驾驶变得安全和实惠。
Arbe的凤凰雷达演示超高分辨率4D成像雷达。凤凰在方位角、仰角和速度上跟踪和分离物体,同时应用后处理和SLAM。
了下:汽车,机器人的报告




告诉我们你的想法!