

对于环境监测,精密农业,基础设施维护和某些安全应用,慢速和节能可以优于快速,始终需要充电。这就是格鲁吉亚理工学院的“斯塔图”进来的地方。
由一对光伏板提供动力,旨在持续几个月的森林顶板,斯塔图才能在必须测量环境变化 - 例如环境中的天气和化学因素时,只能在长期观察到在场。概念证明,超高效机器人,上个月在机器人和自动化国际会议上(ICRA.)在蒙特利尔,很快就会在亚特兰大植物园的树梢电缆中闲逛。
“在机器人技术方面,我们似乎一直在推动更快、更敏捷和更极端的机器人,”他说Magnus egerstedt史蒂夫·w·查迪克(Steve W. Chaddick)学校电气与计算机工程学院主席格鲁吉亚理工学院和斯塔科特的主要研究人员。“但是有许多应用程序,无需快速。你只需要在长时间持续存在,观察发生了什么。“
设计的耐力
基于EGESTEDT称为“缓慢理论”,研究生研究助理Gennaro NoTomista与他的同事们设计了Slothbot YouSef EMAM,使用3D印刷部件需要爬行通过电线网络爬行所需的齿轮和电线切换机构。树木。NOTOMISTA说,电线爬行机器人的最大挑战是从一个电缆从一个电缆切换到另一根电缆。
他说:“挑战是在抓住一根电线的同时,要平稳地抓住另一根。”“这是一个棘手的策略,你必须做得正确,以提供故障安全过渡。最大的挑战是确保开关在很长一段时间内都能正常工作。”
机械地,斯塔托巴托由两个由致动铰链连接的两体组成。每个主体都容纳连接到安装轮胎的轮辋的驱动电动机。用于运动的轮子很简单,节能研究人员说,这种移动方式比其他基于电线的移动方式更安全。
萨洛贝特迄今为止在佐治亚科技校园的电缆网络中运行。接下来,一个新的3D印刷外壳 - 使机器人看起来更像是懒惰 - 将保护电机,齿轮,执行器,摄像机,计算机和其他部件从雨水和风中保护。这将在亚特兰大植物园的树冠上设定长期研究的阶段,希望参观者在此秋季早期会看到斯托伯特监测条件。
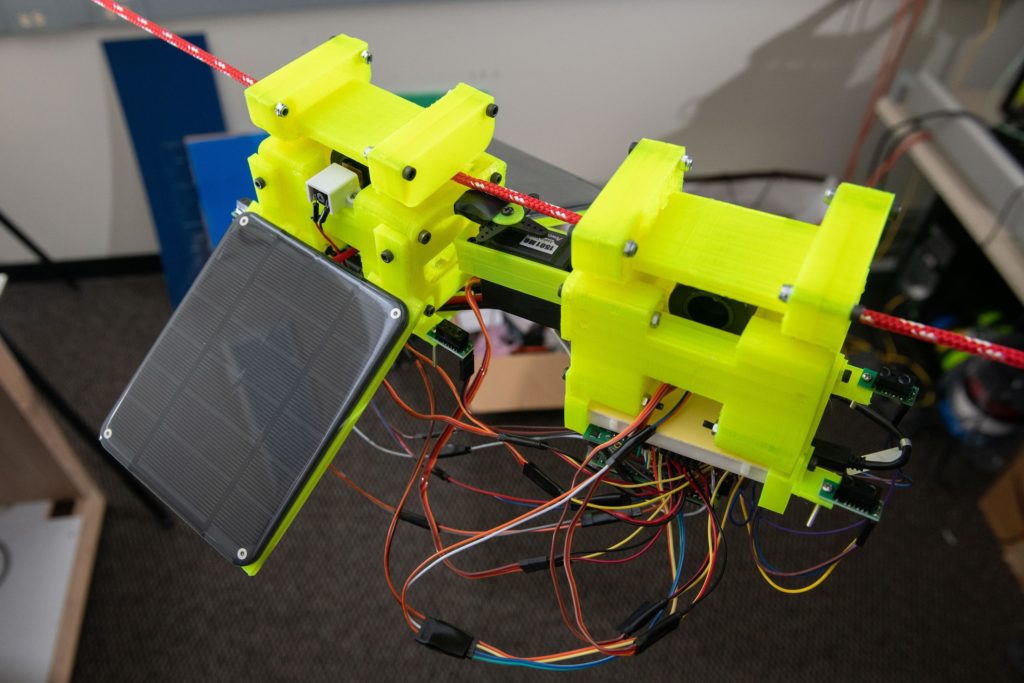
懒惰的组件,由两个光伏面板供电。3D印刷齿轮和开关帮助机器人从一个电缆转换到另一个电缆。信用:艾里森卡特,佐治亚理工学院
缓慢而稳定的灵感
树懒机器人的名字并非巧合。现实生活中的树懒是生活在南美和中美洲丛林树冠上的小型哺乳动物。这些动物靠吃树叶为生,每天的热量相当于一个小土豆。由于新陈代谢缓慢,树懒每天休息多达22个小时,很少从树上下来,它们可以在那里度过一生。
“The life of a sloth is pretty slow-moving and there’s not a lot of excitement on a day-to-day level,” said Jonathan Pauli, an associate professor in the Department of Forest & Wildlife Ecology at the University of Wisconsin-Madison, who has consulted with the Georgia Tech team on the project. “The nice thing about a very slow life history is that you don’t really need a lot of energy input. You can have a long duration and persistence in a limited area with very little energy inputs over a long period of time.”
这正是研究人员对斯洛拉特的期望,其开发已被美国海军研究所资助。
埃格斯泰特说:“对于茂密的树木覆盖区域下实际发生的情况,我们知之甚少。”“大多数时候,树懒机器人只是在那里闲逛,偶尔它会移动到阳光充足的地方给电池充电。”
 主题演讲
主题演讲与真正的懒惰一起测试
研究人员还希望在哥斯达黎加的哥斯达黎加进行斯洛拉伯特,已经成为真正的懒惰。
“用于移动中可的电缆已成为一个懒惰的超高速公路,因为动物发现它们有用的移动,”Egstedt说。“如果一切顺利,我们将沿着电缆部署Slothbots来监视懒惰。”
Egerstedt以驾驶小型轮式或飞行机器人的群体而闻名。但在访问哥斯达黎加的访问期间,他对懒惰的人感兴趣,并开始与乔治亚州科技互动计算学院罗恩····斯金教授宣布他称之为“慢化理论”。该理论利用了能源效率的好处。
“如果你正在做像环境监测等事情,你想在森林里几个月,”Egersedt说。“这改变了你在高级控制系统的方式。”

Jonathan Pauli手表作为一个双皮的懒惰在东北哥斯达黎加的可可植物中移动。Pauli一直在与M. Zachariah Peery合作,在该领域研究树懒了十年。信用:M. Zachariah Peery
心灵运动模式
飞行机器人已经被用于环境监测,但它们的高能量需求意味着它们不能逗留太久。轮式机器人可以用更少的能量通过,但它们可能会陷在泥里或被树根阻碍,不能从地面上看到全景。
“最消耗能量的是运动,”Egerstedt说。“移动比感知或思考要昂贵得多。对于环境机器人,你应该只在绝对必要的时候移动。我们必须思考那将会是什么样子。”
对于帕劳来说,研究各种野生动物的野生动物,与Egerstedt一起帮助Slothbot来到生命一直很令人欣慰。
“很高兴看到由懒惰的生物学启发的机器人,”他说。“分享这些生态系统长时间生活在这些生态系统中的懒惰和其他生物一直很有趣。看到机器人镜像在自然生态社区中所看到的内容将是有趣的。“
这项研究是由美国海军研究办公室通过拨款N00014-15-2115资助的。内容完全由作者负责,并不一定代表ONR的官方观点。
了下:机器人的报告




告诉我们你的想法!