

机器人擅长进行相同的重复运动,例如在汇编线上的简单任务。拿起杯子。把它翻过来。放下它。但是,他们缺乏在环境中移动时感知物体的能力。人类捡起杯子,将其放在随机位置,机器人必须取回它。
A recent study was conducted by researchers at the University of Illinois at Urbana-Champaign, NVIDIA, the University of Washington, and Stanford University, on6D object pose estimationto develop a filter to give robots greater spatial perception so they can manipulate objects and navigate through space more accurately.
尽管3D姿势提供了X,Y和Z轴上的位置信息 - 相对于相机的对象的相对位置 - 6D姿势可提供更完整的图像。
“Much like describing an airplane in flight, the robot also needs to know the three dimensions of the object’s orientation – its yaw, pitch, and roll,” said Xinke Deng, doctoral student studying with Timothy Bretl, an associate professor in the Dept. of Aerospace Engineering at U of I.
在现实生活环境中,所有六个维度都在不断变化。
“We want a robot to keep tracking an object as it moves from one location to another,” Deng said.
Deng explained that the work was done to improve computer vision. He and his colleagues developed a filter to help robots analyze spatial data. The filter looks at each particle, or piece of image information collected by cameras aimed at an object to help reduce judgement errors.
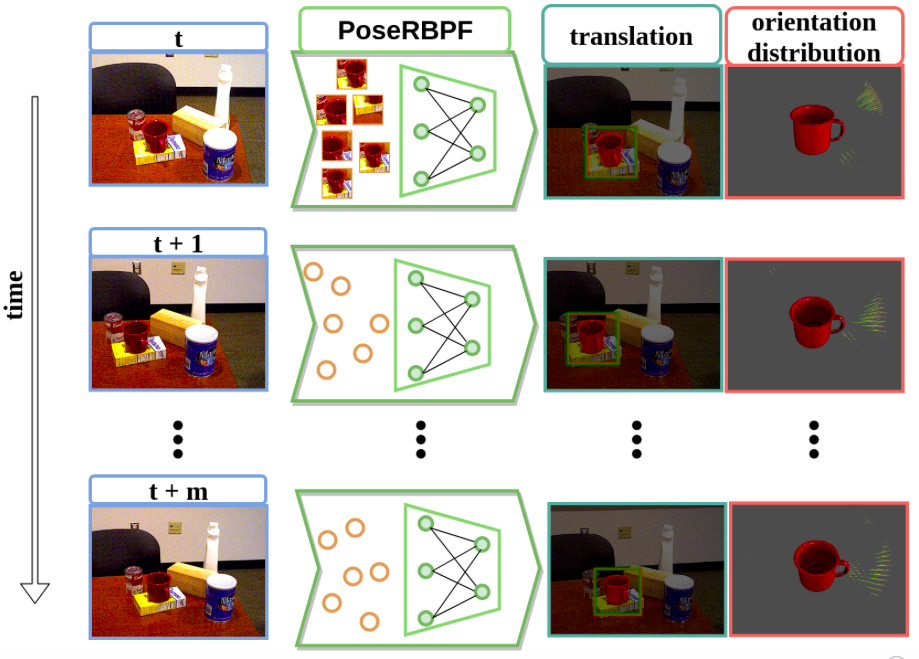
Overview of the PoseRBPF framework for 6D object pose tracking. The method leverages a Rao-Blackwellized particle filter and an auto-encoder network to estimate the 3D translation and a full distribution of the 3D rotation of a target object from a video sequence. | Credit: University of Illinois Department of Aerospace Engineering
邓说:“在基于图像的6D姿势估计框架中,粒子过滤器使用大量样品来估计位置和方向。”“每个粒子都像一个假设,是关于我们要估计的位置和方向的猜测。粒子过滤器使用观察来计算来自其他粒子的信息的重要性。过滤器消除了错误的估计。
邓说:“我们的计划不仅可以估计一个姿势,而且可以估计物体方向的不确定性分布。”“以前,没有一个系统来估算对象方向的完整分布。这为机器人操纵提供了重要的不确定性信息。”
The study uses 6D object pose tracking in the Rao-Blackwellized particle filtering framework, where the 3D rotation and the 3D translation of an object are separated. This allows the researchers’ approach,called PoseRBPF(PDF),有效地估计对象的3D翻译以及3D旋转上的完整分布。结果,PoserBPF可以跟踪具有任意对称性的对象,同时仍保持足够的后验分布。
“Our approach achieves state-of-the-art results on two 6D pose estimation benchmarks,” Deng said.
Editor’s Note:This article was republished from伊利诺伊州的Grainger工程学院在Urbana-Champaign.
Filed Under:Student programs,The Robot Report,Wireless,机器人•机器人触手• end effectors




Tell Us What You Think!