

加入费斯托仿生学习网络新机器人
这费斯托仿生学习网络发布了最新的仿生创新,以支持从自然系统中提取的工程、制造和材料科学的正在进行的研究。以下是2018年Festo仿生学习网络的新成员:
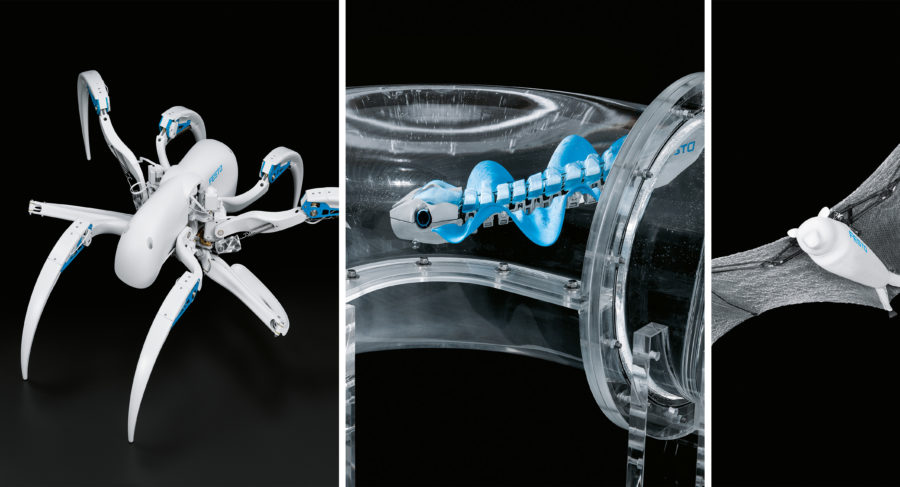
- 一种可以滚动或爬行的变形蜘蛛
- 这是一条机器鱼,可以通过丙烯酸充水的管道自动移动
- 一个半自治的飞行蝙蝠般的超过七英尺(2.28米)的翼展和能力的机器人自我提高其飞行路径
蜘蛛状机器人辊上坡
对于BionicWheelBot的生物模型是单腿拉克蜘蛛Cebrennus rechenbergi) - 一个物种生活在撒哈拉沙漠的边缘比沙丘沙漠。
就像生活单腿拉克蜘蛛,Festo的BionicWheelBot推动本身就带有三角步态使用它的八条腿走路的六人。要开始轧制,在BionicWheelBot在其主体的每一侧弯曲三个腿部,以形成车轮。两中间小腿步行然后延伸并推卷起蜘蛛离地面,以向前推进它在折叠起来。惯性传感器让机器人跟踪其当前姿势所以它精确地倍其下次推断顺序。机器人辊的速度比它走并且可以卷起5%的坡度。
麻利水下航行通过软翅片机器人
对于15盎司的BionicFinWave,费斯托仿生学习网络团队从海洋动物如多壳鱼和墨鱼的波动鳍运动中找到了灵感。它的推进模式可以让水下机器人通过充水的丙烯酸管自主移动。像BionicFinWave这样的自主游泳机器人最终将在水、废水和其他过程工业的检测、测量和数据采集中得到实际应用。在这个项目中获得的知识也可以用于软机器人组件的制造。
从纵向鳍波动力也让BionicFinWave演习本身前进或后退。散热片驱动单元特别适合于慢和精确的运动...,并导致较少的湍流在水中比常规螺旋推进驱动器。虽然其移动通过管系统中,机器人也通过无线电向共享的温度和压力传感器读数到附近的I / O通信。
BionicFinWave的两个侧鳍是由硅树脂制成的,可以独立移动以产生不同的波浪模式(或以曲线形式游动)。BionicFinWave通过将身体弯曲到目标方向向上或向下移动。集成曲轴,关节,活塞杆3D打印从塑料。其他几何复杂的BionicFinWave组件也是3D打印的;这有助于保持体重。压力和超声波传感器不断记录BionicFinWave到墙壁的距离和它在水中的深度,以防止与管道系统发生碰撞。这种自主和安全的导航需要开发紧凑、高效、防水或防水的组件,这些组件可以通过适当的软件进行协调和调节。
飞行机器人利用机器学习来选择飞行路径
在世界上最大的蝙蝠中,为了模仿飞狐,BionicFlyingFox的机翼运动学分为一级和二级,所有关节都在同一平面上。为了让BionicFlyingFox在一个确定的空间内半自主地移动,机器人与一个运动跟踪系统通信,该系统反过来规划飞行路径并发出命令。
启动和着陆由人工操作人员执行;自动驾驶仪会在飞行过程中接管。储存在电脑上的预先编程的飞行路线指定了20.5盎司(580克)的仿生飞行狐狸在执行动作时所采取的路线。机翼的运动需要有效地实现预定的运动序列,由其机载电子计算。BionicFlyingFox在飞行过程中优化其行为,并在每个电路中更精确地遵循指定的路线。
覆盖在骨架上的膜是仿生学团队为“仿生飞狐”特别开发的。它由两个气密箔和一个编织的弹性织物组成,在大约45,000个点焊接在一起。这种织物的蜂窝结构可以防止飞行膜上的小裂缝扩大。因此,即使织物受到轻微损坏,仿生飞狐仍能继续飞行。由于它的弹性,飞行膜几乎保持无折痕,即使当翅膀缩回。由于金属箔不仅有弹性,而且不透气、重量轻,因此它有可能用于其他飞行物体、服装设计和建筑领域。
提交:机器人报告那机器人•机器人夹具•终点效果那传感器(压力)




告诉我们你的想法!