

先进物流车辆和移动机器人转向设计从了解设计要求开始;决定习惯是否重要;为特定的应用选择最佳的解决方案。
作者:Will Hellinger•工程经理|结盟运动
物流车辆包括堆垛机、叉车、侧装载机、推车和拖车,甚至还有移动机器人。这些机器人将物品从一个点移动到另一个点,在货架上和货架上放置和移除物品,填充托盘,装卸卡车,并协助人类进行其他工作。但这类车辆的有效性取决于它们的转向装置。物流车辆和移动机器人需要快速和准确地引导到特定的位置。这一任务越来越多地由电动助力转向(EPS)来完成。

这是一个造纸厂的机器人铲车,它使用的是一种纺纱机。物流车辆的常见转向架构包括差速转向;带有两个固定脚轮的单方向盘转向;两个转向轮能够180°转向;还有两个方向盘,至少可以360°旋转。
过去,AGV和机器人车辆的oem厂商想要加入电动执行器,就必须从零开始建立自己的系统。今天,这些工程师可以从无数的集成转向构建中进行选择——要么是现成的,要么是为手头的应用程序定制的。
电动转向解决方案用于工厂车辆
转向系统必须是准确和可靠的,即使在高占空比。它们还必须坚固、经济、易于安装、操作和维护。此外,它们必须满足电动转向的特殊要求。
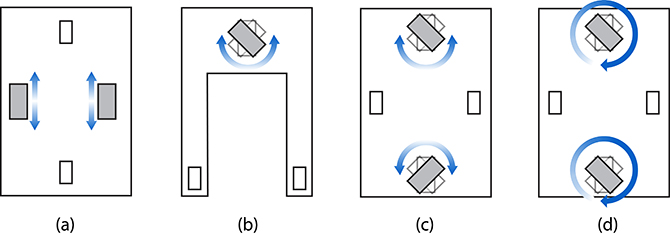
物流车辆的常见转向架构包括差速转向;带有两个固定脚轮的单方向盘转向;两个转向轮能够180°转向;还有两个方向盘,至少可以360°旋转。
运动路径要求:车辆转向最简单的运动任务是使车辆沿直线行驶。一些装置将车辆安装在轨道上,因此不需要转向,只需要驱动轮的动力。稍微复杂一点的是,通过固定牵引轮驱动的车辆以不同的速度运行。这种差速操作提高了机动能力,但在非常急转弯或快速转向操作时,这种方法会磨损轮胎,并对车轮与底盘连接的连接处施加压力。
- 车辆必须执行煮呢-垂直于主行程轴的运动-需要至少两个主动方向盘能够180°旋转。Mecanum或Omni轮等奇异的轮子支持这种捕蟹。
- 必须原地旋转(并沿轴旋转)的车辆需要2到4个主动转向的轮子,每个轮子至少可以360°旋转,或者至少在车辆中心线上有两个轮子,以便向同一个方向同时旋转。
转弯半径:车辆所需的转弯半径也会影响转向设计。一个单驱动方向盘和两个脚轮的三轮平衡卡车有相当大的转弯半径。有四个方向盘的车辆(每个方向盘都能360°旋转)有最小的转弯半径和最灵活的其他运动,而不需要上述奇异的车轮。
注意转弯半径可能限制车辆的最大车轮或电机尺寸。特别是小型车辆,必须有足够的间隙,以避免在运行过程中车轮底盘的干扰。
转向力矩要求:驱动表面,负载和轮胎材料都影响转向车辆车轮所需的扭矩。车辆速度也会影响这个转矩值。在一辆满载的叉车停止时,旋转车轮需要的扭矩要比在卡车移动时旋转车轮所需的扭矩大得多。转向电机和变速箱的尺寸必须提供足够的扭矩,以满足前者。
转向传感器类型:叉车、agv和其他移动设备可能在非常狭小的空间内运行。控制转向算法或操作者必须对车轮角度有准确的了解,因此车轮位置感知和反馈是必要的。
使用相对车轮位置反馈是经济的,但需要在启动时一个归航序列来建立一个已知的方向盘位置。绝对位置传感是一个更好的选择,但传统上涉及使用接近传感器或多转绝对定位传感器-增加了设计成本。第三种(也是经济的解决方案)是使用牵引执行器,在齿轮装置中使用霍尔效应传感来建立绝对的车轮位置,而不需要导航程序。
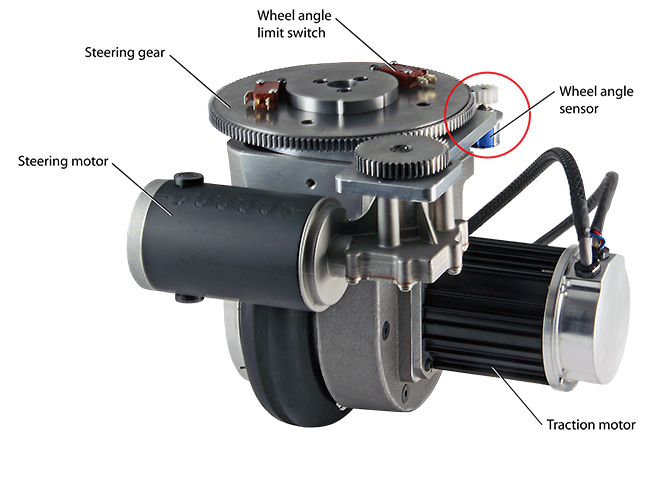
这一综合牵引轮组件与转向包括一个直角永磁齿轮马达。齿轮马达转动一个小齿轮,使车轮绕其中心线旋转。白色小齿轮和蓝色传感器(红色圈出)将车轮位置反馈给车辆控制器。
协同物流空间的安全:特别是在车辆靠近人类行驶的情况下,安全操作是至关重要的。因此,工业已经发展出一套全面的安全标准。满足这些标准需要冗余系统、专用硬件和软件的组合。在线控转向系统的情况下,没有机械转向连杆存在。该系统必须检测到任何问题,迅速使车辆完全停止,然后使用刹车。
车辆可靠性:围绕自动化系统设计的操作在车辆停机期间会陷入停滞——即使生产设备运行良好。系统在运行的同时保持足够的经济性以成为可行的解决方案是至关重要的。在最近行业向面向服务的模型转变的背景下,可靠性特别重要。越来越多的原始设备制造商出售的是运输货物的服务,从而延长了正常运行时间,而不是车辆本身。在这种情况下,可靠性不仅是一个卖点,而且是业务的一个基本方面。
集成电动助力转向(EPS)组件
一个EPS组件包括电机机械耦合到一个旋转安装的轮子。该EPS单元包含一个小齿轮,使转向齿轮固定到车轮组件。EPS可以根据控制(或操作人员手动控制)的命令转动舵轮。汽车制造商越来越喜欢完整的转向驱动系统,特别是那些可定制的特定车辆。在一种设计中,无刷电机,齿轮传动,伺服驱动和反馈都集成到一个单一的转向驱动单元。
简而言之,主要车辆控制器收集来自EPS执行器集成传感器的输入,并计算路径命令。它通过现场总线或无线网络将这些信息发送到EPS驱动电子设备(此时CANopen最为常见)。这种操作被称为线控转向,因为在驾驶员的方向盘(或车辆控制器,在自动驾驶汽车的情况下)和方向盘之间不存在机械连接。
电动转向解决方案通常包括集成或螺栓齿轮箱的机械优势。生产比使转向组件产生足够的扭矩使用更小,更便宜的电机。
当然,转向执行器应该尽可能靠近车轮(最好与车轮组件集成),以消除需要额外的机械联轴器之间的转向单元和车轮。也要注意,一些车辆的设计可能受益于垂直方向的牵引或转向电机。当设计中有额外的垂直空间或水平空间非常珍贵时,情况尤其如此。在某些情况下,这种垂直配置还可以让工程师获得更小的车辆转弯半径。
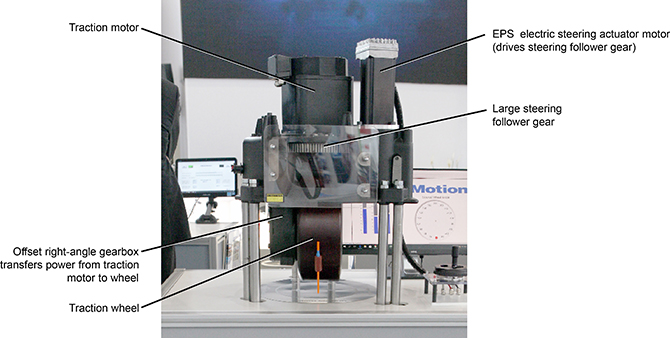
这是一个垂直导向的牵引轮组件。EPS转向执行器位于牵引电机右侧;它驱动的舵机位于牵引电机和车轮之间。
牵引驱动转向的设计方法
与牵引解决方案一样,转向解决方案包括离散和集成架构。最佳选择取决于应用程序。
离散的牵引驱动转向构建是独立选择的运动组件的集合。这样的设计更具可定制性。然而,它们迫使原始设备制造商在系统集成上花费更多的时间——这意味着更高的总体成本。在整合转向系统上花更多时间也意味着OEM设计团队在车辆本身设计上花的时间更少。
当车轮必须同时提供动力和转向功能时,离散转向构建甚至更加困难。整个车轮组件(可能包括两个不同的电机)在转弯时也必须描述尽可能小的圆包络。
在这里,完全集成的EPS单元通常比oem制造的设计更紧凑和更灵活。集成电动转向系统可购买完整的组件大大简化了设计和安装。所有组件都设计为最佳的互操作。例如,变速箱是预先设计的,以满足设计扭矩和功率-即使在最大限度地减少间隙和磨损。由于部件供应商大量购买这些子部件,当原始设备制造商以较低的数量采购时,最终组装的成本较低。
集成转向构建还将布线最小化,以减少外部布线和互连的成本和复杂性。这在一定程度上是因为集成设计将电子元件集成到执行器中。
事实上,集成的EPS转向构建还包括可以定制应用程序需求的嵌入式软件。这节省了开发代码和软件验证的工程时间——特别是安全方面的昂贵和耗时。单单元集成设计也可以认证为单元,为原始设备制造商节省更多的时间和资源。
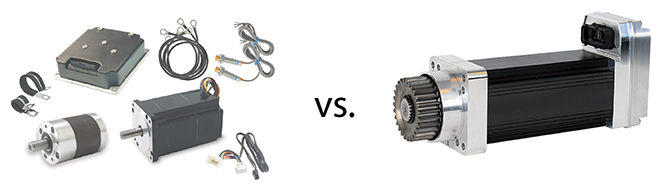
Allied Motion EPS转向电机执行机构(右)比由离散组件组成的子系统(左)更紧凑和经济。集成运动设计还有助于oem缩短工程和装配时间。
但是集成系统并不是通用的解决方案,甚至可能危及需要完全定制的应用程序。维护完整执行器的备件也可能比拥有离散执行器组件的库存更昂贵。另一方面,对于终端用户来说,停机时间通常是非常昂贵的,所以完全更换执行器(以快速恢复完全运行)可能比离散转向构建更低的总拥有成本(TCO)。

联合运动的EPS90集成转向电机执行器(这里有一个SWS方向盘传感器附件)包括电机,传动装置,反馈传感器,以及电源和控制电子。
最后要注意的是,驾驶对驾驶员的感觉如何
在传统的转向系统中,驾驶员通过与车轮的机械连接获得车辆的触觉反馈。但是线控转向系统没有这样的连接,所以电控线控转向动力转向系统必须通过操纵方向盘时阻力的微小变化来模拟驾驶员对路面的触觉反应。
在线控转向系统中诱发摩擦的常见技术包括机械刹车、电磁刹车和磁性系统。机械和电磁刹车应用摩擦,为司机提供一个更现实的感觉,车辆是如何在驾驶表面上移动。但是基于摩擦的设计可能会有问题,因为它们会在启动时向操作人员传递一种误导的滑杆感觉。
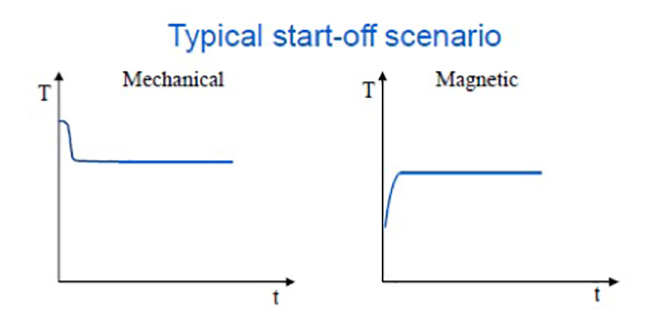
这些分离扭矩与时间的关系图显示了基于摩擦的阻力是如何在运动开始时产生粘滑的——这使得驾驶员很难进行轻微的转向调整(例如,在一个狭窄的仓库通道中行驶)。磁性版本提供了更一致的触觉反馈。
机械刹车也可以工作,但它们的摩擦接触意味着它们会随着时间的推移而磨损——需要持续监测和定期维护。性能取决于温度,这对材料搬运车辆来说是个问题,因为它们可能每天在冷库和室外之间往返多次。为了安全有效,模拟电阻需要保持一致。
电磁制动是有效的,但昂贵和笨重,并不是总是有足够的反应时间,以满足安全标准。
相比之下,基于磁技术的系统可以提供非常真实的方向盘感觉(阻力),而且经济。磁性系统不使用摩擦,所以不会出现粘滑现象。通过机械连接,驾驶员可以获得模拟驾驶感觉的平滑运动。当与磁位置传感配合使用时,磁阻技术为线控转向设计带来了真实的性能。转向的感觉是可调节的,甚至在某些情况下可编程……非接触操作消除了磨损和维护要求。

有线转向系统中的联合运动方向盘传感器(SWSs)使用磁电阻来模拟机械连杆的感觉。
联合运动电动转向|alliedmotion.com/vehicle-steering-traction/traction
联合运动电动牵引|alliedmotion.com/vehicle-steering-traction/traction
了下:汽车,机器人报告,齿轮•齿轮头•减速机,机器人•机械手•末端执行器




告诉我们你的想法!