

对于主要需要承载少量运动的负载的应用,有特殊的伺服电机尺寸考虑。但是,人们常常在描述这种设计的术语中产生混淆——尤其是在术语的普遍使用中摊位在伺服电机行业。在这里,我们阐明了定义的上下文,然后将其与轴的有效均方根力-扭矩计算相关联,以适当的电机尺寸。
作者:Hurley Gill•高级应用和系统工程师|Kollmorgen
闭环反馈系统在非传统伺服电机设计中的扩展,促使了对专用电机功能的更多需求。有些伺服电机的应用需要力或扭矩来维持相对于轴的运动轮廓相当长的一段时间的负载。这就需要对术语进行澄清,特别是那些在特定的操作条件或事件下不是同义词或等价的术语,但被包含其他电机类型的术语互换使用。
潜在的不一致的沟通可能导致各方之间的不正确解释,并降低电机尺寸、机器编程、机器启动和事件或产品过程问题的故障排除。
图片来源:sykono
例如,术语摊位或失速扭矩绝不出现在感应电动机的规格中。但这些术语通常用于描述电机负载超过满载或击穿转矩能力时产生的条件。非伺服电机(如感应电机)在任何非正常工作状态下都被称为锁转子或熄火(零rpm)状态。如果施加的负载超过了电机的连续全负荷转矩,电力需求也会持续,电机将过热,最终烧毁。
如果电机熄火(0_rpm <实际rpm <满载rpm),它产生的电流大于它的连续容量,如果这种情况持续下去,电机绕组将过热。这种不正常的失速,失速,或失速的开环式感应电机不是任何正常应用的典型部分-所以任何感应电机在任何这些情况下:
- 受电机散热能力的影响,其热损失相对于其负载需求和
- 将导致电机的绕组过热和燃烧,如果过载继续。
熄火的电机可能会以低于额定转速的速度继续运行一段时间,但当它停止运行时(由于过载保护装置跳闸或由于烧毁),它并没有熄火。毕竟,没有动力或烧毁的电机可以识别机械负载。
这里显示的是科尔摩根AKM2G交流同步伺服电机。与异步异步电机不同,这种伺服电机的转矩、速度和位置受到驱动回路增益和限制以及驱动器折叠电路的峰值电流限制的限制。
伺服电机设计-停止条件可能由设计
相比之下,在负载下有目的地保持位置(或对负载保持扭矩/力)的伺服控制条件可以是运动应用的正常功能,这与我们上面的感应电机的例子完全不同。不幸的是,它也是一种运动状态它与这些术语联系在一起失速、失速、失速或锁定转子.因此,当伺服电机(作为闭环系统)的大小适合特定的操作条件时,它只会做它被命令做的事情,而不会做其他事情。当适当的尺寸和正常运行(大小),这样的伺服电机可以处理它的命令负载(在负载下保持位置或保持扭矩/力对负载)内定义的事件或运动轮廓-没有过热的威胁。
事实上,在伺服电机行业中对这些术语及其含义的大多数困惑源于这样一个事实,即没有指定的术语来描述当伺服电机尺寸不合适或在其规范之外使用不当时。用开环系统专用的术语来描述这样的应用问题会引起混淆——这主要是因为对不同风格的电机系统的混合解释和理解——比如开环控制和闭环控制。
因为有问题的术语有时是交替使用的,让我们首先描述一下它们是如何在非伺服(感应)电机行业中使用的。
异步电机锁转子表达式的意义
对于有动力的开环感应电动机,这个术语锁定转子实际上是确定电机在产生最大启动转矩(锁定转子转矩)时所产生的最大可能启动电流(锁定转子电流或LRC)的条件或程序。这个最大启动电流和由此产生的最大启动转矩通常是在实验室环境中测量的,电机的转子锁定在适当的位置——因此术语锁定转子。
锁定转子电流(LRC)通常出现在感应电机的铭牌上,标识为锁定转子安培(LRA),这是电机在第一次施加功率时,在零转速下所获得的最大可能启动电流(滑移是最大的)。
在实际的感应电机应用中,这是当电源第一次应用到电机时,电机在短时间(间歇)内所能承受的最大可能电流。这是在电机的转子加速以减少滑移(电枢场和转子之间的Δrpm),以使电机达到与施加的负载平衡的平衡运行点-最好在其连续额定值内。感应电机开环间歇电流超过电机的连续能力通常在加速期间(当功率第一次施加时)和偶尔在过程负载扰动期间出现,但总的均方根(RMS)电流随着时间的推移必须保持在电机的连续能力内。
伺服电机的性能(就像其他电机一样)也受到其散热能力的影响——尽管它比其他类型的电机更不可能因过载而过热。这是因为伺服控制和反馈以及闭环设置和来自驱动放大器的限制(以及潜在的其他控制器编程)将电机保持在一个安全的工作范围内。与开环感应电机的过载情况不同,典型的伺服电机可以被控制在其连续能力以上的间歇性运行。
但就像开环感应电机一样,随时间推移伺服电机所看到的有效值电流必须保持在电机的连续能力之内。否则,电机绕组会过热。伺服电机上的间歇过载状态执行特定的功能,是有目的的。因此,当设计中包含这些状态时,工程师必须在电机驱动选择时考虑到它们,以确保正常机器操作、维护、安全事件和潜在故障期间轴的正确运行。
今天使用的伺服电机评级技术是多年前开发的,当时大多数应用程序在零运动期间不会经历大量的负载(相对于应用程序的整体运动轮廓)。因此,当考虑其中一个非典型应用程序时,将分别评估其在这些特殊条件或事件期间的需求。来自这组独立计算的结果可能会覆盖也可能不会覆盖应用程序的有效RMS扭矩计算。
在机器人、工业和工厂自动化过程中使用的一种专用伺服电机是在很少或没有电机运动的情况下对负载保持特定的扭矩/力。应用可能是一个简单的夹具或保持垂直负载对抗重力(保持制动将增加工艺时间或降低精度)…或应用可以保持扭矩/力对抗负载测试…或动态固定一个零件在某些工艺…或以可控的方式排出高粘度液体。
除其他外,为这种用途调整伺服电机驱动组合的一个关键因素是持续时间这种(有效连续的)负载在其运动剖面中很少或没有执行器运动-或针对某些特定事件-相对于:
- 电机和绕组的热时间常数和
- 驱动能力。
如果伺服电机是适当的大小和操作与适当的驱动系统设置为给定的应用,那么它不会过热,跳越保护装置,或烧毁。在这样的伺服电机利用计划下,伺服电机的最坏情况可能实际上是电机在正常运行期间对其施加的负载(由于重力或其他原因)持续运行。或者最坏的情况可能是在机器或线路(或维护操作)停机的情况下,根据轴的运动轮廓计算出的有效RMS扭矩/力需求超过了要求。
与开环异步感应电机(能够牺牲自己,同时试图满足其负载的需求)不同,闭环伺服电机的转矩、速度和位置由以下因素控制和限制:
- 驱动器的电流/速度/位置环路增益和限制和
- 驱动器的折叠电路和编程的峰值电流限制随着时间的推移-这是I2t折叠式,通常设置为Ic(电机)或Ic(驱动器)。
因此,即使当伺服电机可能出现要处于物理上的停止或锁定转子状态,当适当的大小和程序,它是被专门控制在其连续能力,从而在电机的能力内消散自己的热损失。然而,为了描述这个操作,特别是当有轴的问题时,我们的主题词/术语经常交流,在头脑中有不同的含义或解释。
伺服电机行业术语摊位在转矩/力表达式和其他术语中,常作为下标出现,以表示伺服电机可获得的最大连续转矩(Tc)和由此产生的连续电流(Ic)需求。
连续转矩及其产生的Ic在特定的环境温度下(在整个电机绕组中具有均匀的稳态热损失分布),根据特定的温升和散热器(安装板)尺寸提供转矩容量,而不会导致电机绕组过热。
这个术语的用法摊位它的意思完全不同于这个词的一般定义——在通常的定义中,stall的意思是停止并且:
- 当感应电机不能再以其设计转速与施加的负载相对抗时,就会出现转子锁死(完全停止或停止的情况)或
- 熄火-在被阻止的路上-或者
- 失速-运行在转速比额定转速慢,但不是在零转速。
所以这个词很清楚摊位描述感应电机系统有不同的意义摊位用于伺服行业。
对这个词的普遍误解摊位意味着即使是一些制造商的出版物也不正确地说明了这一点摊位意味着零转速或没有转子运动。
交流无刷伺服电机定级时失速表达式的正确使用
现在的问题是:如何调整交流(无刷PM)伺服电机的尺寸,使其不会在绕组处过热——特别是对于需要连续保持力矩/力的设计,在一段时间内很少或没有运动,使轴的运动轮廓有效的rms计算无效?
如前所述,这种失效是由于什么会导致不均匀的热损失分布在电机内。
我们将使用一个应用程序示例来回答这个问题。首先,回顾一下制造商是如何确定连续电流Ic(电机)的评级的。我们将假设具有正弦波换向的RMS电流,但一些制造商使用其他方法表示Ic。通常,伺服电机的额定是建立最大的连续容量,内部绕组损耗的热分布均匀地分布在整个电机。这意味着在额定过程中,电机内部的电循环以足够快的速度移动,以使内部损失的热量均匀分布,但又足够慢,以确保jXl核心损耗在电机内部基本上为零。这个物理测试速度通常为1到4_rps(转/秒)左右的电机,但可能更慢或更高-作为电机的极对的函数。
大多数制造商在这个或类似的速度下定义连续转矩(Tc)和产生的电流(Ic)。发布的连续转矩和电流规范通常也被确定为失速转矩(Tc_stall)和失速电流(Ic),而不管换向类型和产生的电流单位是什么。
注意两者之间的区别摊位它被用于受控闭环动态测试(用于确定伺服电机的最大连续能力)与我们对失速、失速和失速的定义相比较,因为它们描述了超过感应电机最大能力的过载条件——无论转子是否停止运动。
也要考虑当伺服电机在一定的负载下,很少或没有运动时,伺服驱动器的输出在做什么。因为我们在我们的例子中使用正弦换向,被控制的三相交流输出有效地处于停顿状态——呈现一个连续的PWMed非移动三相输出,其值(适用于伺服电机的换向位置)等于在该位置位置上本质上是一个冻结的信号。这可能在你的脑海中被想象为移动的正弦波的瞬间快照。
两种主要换易方法的主要区别是:
六步或块(未经修改的梯形)换向只允许电流流过三个电机相中的两个在任何给定的时间- 2-ON 1-OFF在任何时候
正弦波或正弦波换向允许电流在同一时间通过三个电机相位(当适当时),电机的每个电周期呈现为伺服电机的正弦波。
这两种不同的换相方法需要不同的电机转矩常数(Kt)表示。如需更多信息,请下载PDF白皮书,交流永磁和PMDC无刷伺服电机的参数和转换可在www.kollmorgen.com下载。
当今大多数旋转伺服电机的设计在电机绕组、层压板和框架之间具有良好的导热性,特别是环氧封装。也就是说,每一种设计在线圈和框架之间都有不同的导热系数,准确地建模这些值需要进行重要的热建模或实际测量和测试。因此,为了本文的目的,我们将假设每个电机绕组是一个独立的安装线圈-没有线圈看到热转移到电机中的另一个绕组或线圈的区域的热优势。
在我们的示例设计中,每个绕组可以耗散75_watts。
在伺服电机满载的情况下,最坏情况下的两个换向位置为:
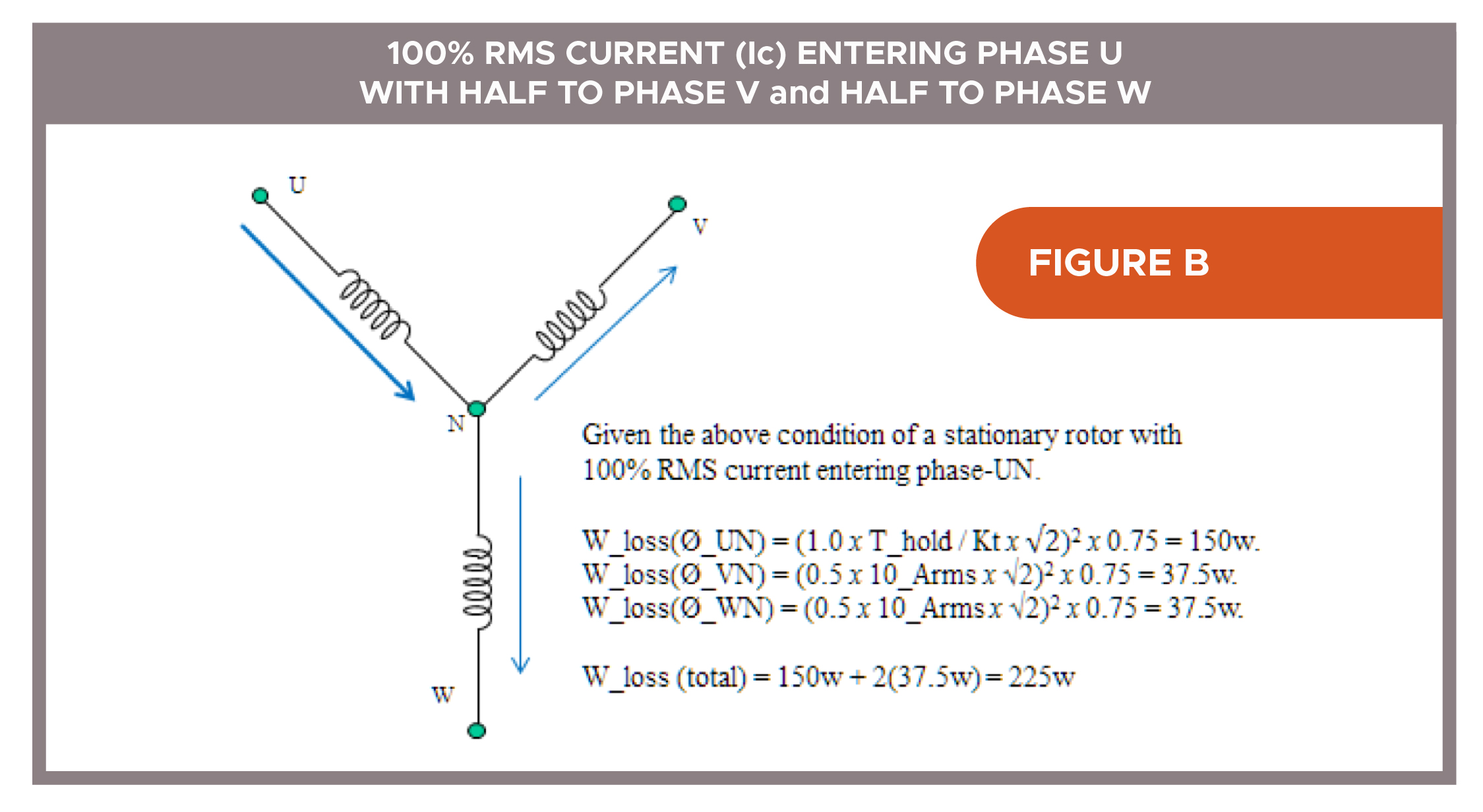
- 所有(100%)电流(I_actual = Ic x√2)通过一个绕组,50%通过其余两个绕组-如图所示图B
- 所有适用(86.6%)电流只通过两个绕组(I_actual = Ic x cos(30°)x√2)-如图所示图C.
这是电机绕组将看到的最坏情况,如果驱动器的Ipk运行时间(由I控制2t电路/程序)折叠回电机公布的连续电流ic_失速-建立与缓慢rpm的均匀热损失分布。
这里我们选择一个性能为Tc =>√2 x T_hold的电机。为了简单起见,我们忽略了统计上的失败概率。
对于所示的条件图B,假设Ic(电机)_stall = 10_Arms,负载为10_Nm。还假设换向位置和负载需要10_Arms通过相U保持该固定位置。那么相U实际上有14.14个dc - amp [10_Arms x 2]连续PWMed通过它。这意味着U绕组必须设法消散(14.142x RmØ)瓦特损耗对比(102x RmØ)瓦的损耗是其容量的两倍——当然,它不能持续这样做。
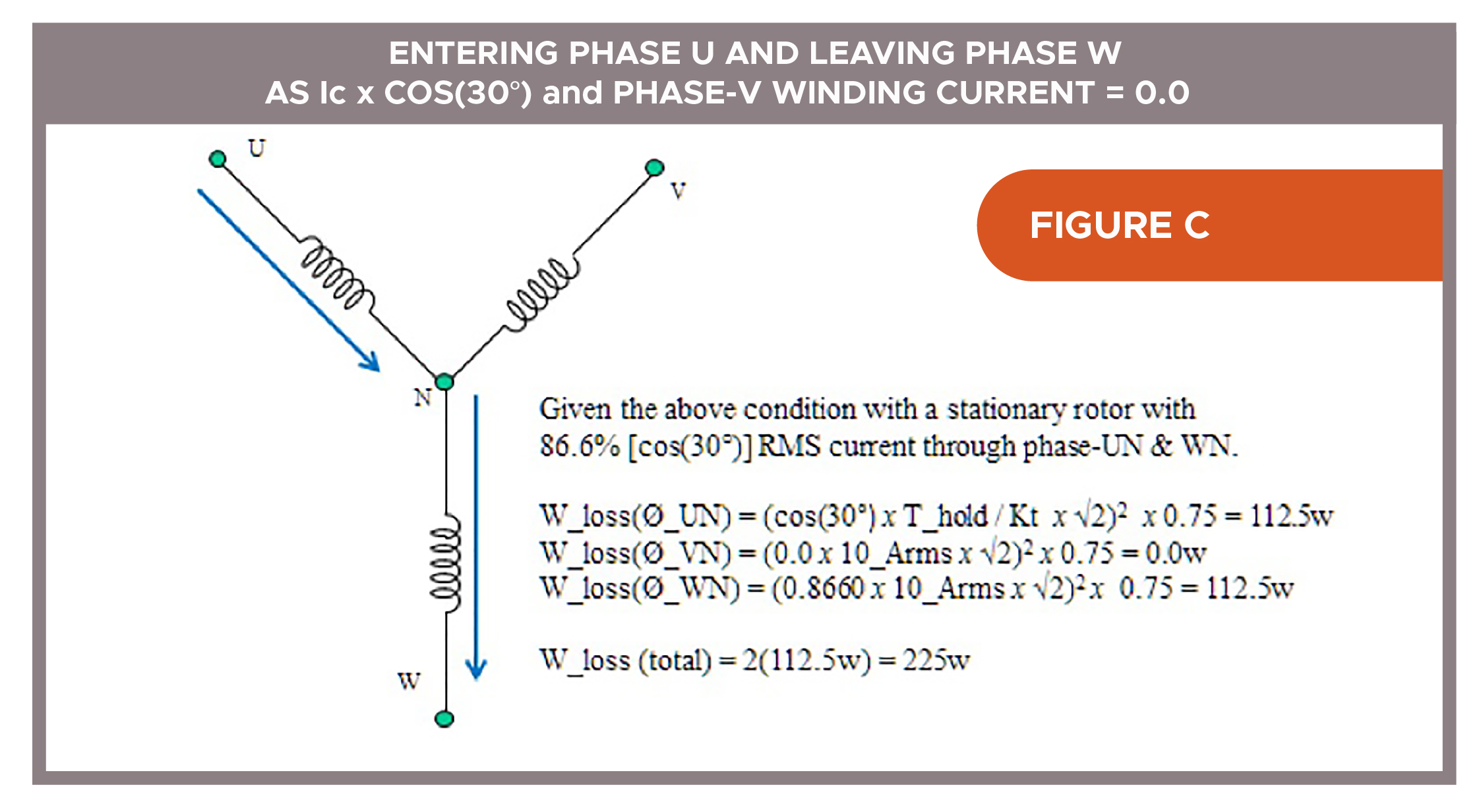
当所有适用的(86.6%)电流通过两个绕组时,这是我们两个最坏情况换向位置中的第二个。
类似地,对于中所示的条件图C,两个线圈都试图消散(12.2472x RmØ)瓦损耗与(102x RmØ)瓦损耗-超过每个线圈容量的50%。
计算清楚地表明,当确定伺服电机的尺寸时,一个关键因素是有效的静止电流(保持负载静止)相对于电机在这种条件下消散其绕组损耗的能力。
因此,我们需要一个具有连续转矩额定值(Tc)等于√2 x T_hold所需的电机-不是因为我们需要任何额外的电机转矩,而是因为我们需要每个电机的绕组可靠地处理(有效连续的一段时间),否则将是一个移动正弦波电流的瞬时峰值。
在这些条件下(假设标称值和没有余量),使用额定Tc(失速)= 10_Nm的伺服电机在需要10_Nm无限保持垂直负载的应用中是不够的。然而,选择一个稍微大一点的电机,能够达到Tc(失速)=> 14.14 nm就足够了。
此外,如果驱动器也是按照Arms来额定的,它只需要产生电机产生10_Nm所需的连续RMS电流(大约10_Arms,如果伺服电机的Kt = 1_Nm/Arms)。
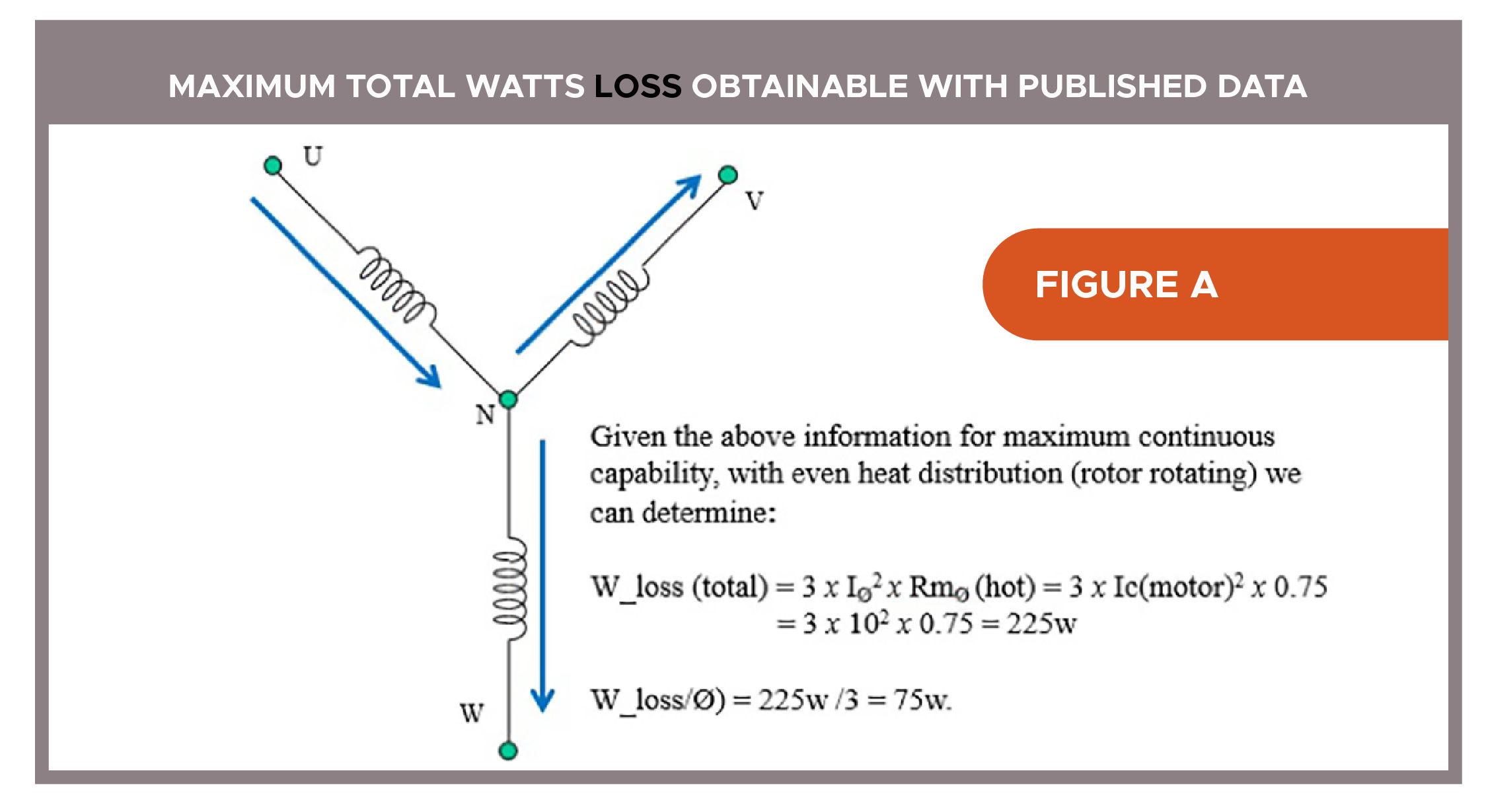
我们可以证明这一点,首先确定瓦损耗能力在连续额定-示图一个.然后,我们比较了功率损耗能力与三相电机线圈的两个最坏换向点,其中电流为100%,50%,50% (图B)及86.6%、86.6%、0% (图C).
给定电机信息:
Tc(摊位)= 10 _nm
集成电路(摊位)= 10 _arms
Kt = 1.0 _nm /武器
Rm(L-L)_25°C = 1.006 _欧姆,其中Rm(L-L)_150°C =(1.006 _欧姆× 1.491);而且
Rm Ø_150°C = 1.5/2 = 0.75 _欧姆
温度(连续操作的最终绕组温度)= 150°C
Temp-Rise (max。从25°C环境)= 150°C - 25°C = 125°C
因此,基于这些信息、应用条件和我们的假设,每个电机绕组是一个独立的相(Ø)分支或线圈(没有热量传递到另一个绕组的热区域的优势),每个绕组可以耗散高达75_watts。
如果我们考虑所有(100%)电流(I_actual = Ic x√2)的两个最坏换向位置中的第一个,我们可以得出瓦特损失(总)仍将等于225_watts (图B);但需要通过一个绕组(Ø_UN)消散的特定瓦数比先前计算的75_watts (图一个),其他两个绕组各为50%容量。
在这种情况下(图B),为了防止任何该电机的绕组过热,由于这一特定的换向位置,我们将需要限制Ic(驱动器)到Ic(电机)的70.7%。在我们的例子中,如果给定的10_Nm保持负载要求被维持,这个电机选择将不能在没有过热的情况下完成工作。因此,一个可能的解决方案是选择一个具有能力的电机:Tc =>√2 x T_hold,最好与大约相同的电机转矩常数(Kt),这样就可以在不改变驱动器的情况下保持所需的最大应用rpm。
如果我们考虑第二个最坏的换向位置,所有可用(86.6%)电流仅通过两个绕组(I_actual = cos(30°)x Tc(电机)x√2),我们看到瓦损耗(总)将再次等于225_watts (图C);但是需要通过绕组(Ø_UN)和(Ø_WN)消散的特定瓦数比先前计算的每个绕组75_watts(图A)的热容量高出50%。
在这种情况下(图C)我们只需要将Ic(电机)的RMS驱动电流(Ic(驱动器))限制在81.6% [100 x (75w/112.5w)1/2],以防止电机绕组由于这个特定的换向位置而过热。收益率W_loss(Ø_UN) = W_loss(Ø_WN) = ((10 _arms /√1.5 x cos(30°))x√2)2X 0.75 = 75_watts。
尽管如此,如果10_Nm保持负载要求没有重新指定到一个较低的值,该电机选择将无法完成工作-如描述的情况图B.对于这种特殊情况,我们可以选择性能为Tc =>√1.5 x T_hold的电机。然而,这仍然允许33.3%瓦负荷的第一换向条件,如图B.
更好的解决方案是选择具有Tc =>√2 x T_hold能力的电机,详见图B.
理解失速-为正确的伺服电机计算
理解术语的含义摊位在伺服电机的背景下,工程师可以正确地考虑轴的运动轮廓和负载需求的相对负载需求时间(相对于总周期时间)。这样,就可以确定和分析主要因素,用于尺寸计算、机器轴编程和故障排除(用于正常操作或其他情况)。这些主要因素允许在结果之间进行合理的考虑:RMS计算和任何有效的常数或常数,负载保持较长时间相对于轴的总运动剖面时间,电机的热时间常数:tct_电机和tct_绕组,以及伺服驱动器的I2t监听算法。

图片来源:Thossaphol
在保持有效无运动的连续负载(以及伴随此条件而来的静止PWM驱动换向)时,对电机最坏情况下的换向位置的充分理解是正确的电机和驱动器尺寸的核心。在相对于运动剖面时间或热时间常数较长的时间间隔内保持扭矩对抗负载(外部或其他)会导致错误的RMS结论(如果不进行修正)。
边注:对于相对于运动轮廓的时间和要求以及任何拟议的电机热时间常数较高的间歇转矩要求,也需要类似的考虑。这本身就是一个话题。谷歌K管理PM交流伺服电机过载:热时间常数下载有关本主题的白皮书。
在实际应用中,考虑到今天的电机绕组、层压板和框架之间良好的导热性,扭矩倍增器可能是保守的。然而,作者多年来在电机设计和应用方面的经验和收集的反馈表明,铁芯旋转伺服电机的√2乘法器的安全裕度约为9 - 11%。虽然这一信息尚未得到具体验证,但√2乘数的最坏情况似乎提供了足够的余量来克服典型的±10%的制造公差。因此,使用√2转矩倍增器选择一个连续能力等于计算的连续需求(或略高于)的电机是合理的。

良好沟通的重要性是至关重要的,以避免失速(及其衍生词)和术语失速在伺服电机行业中定义为正常参数化、操作或其他的一部分。图片来源:Thossaphol
然而,对于无铁芯电机,不假定有余量…对于这些电机,建议设计工程师特别考虑每个制造商的失速等级定义。交流伺服电机行业的摊位是一个有特定定义的有限术语,但不是固定到不能部分或全部重新定义的程度——特别是对于特殊用途的伺服电机或特定设计的伺服电机,例如交流永磁无铁芯伺服电机。
Kollmorgen| kollmorgen.com

Hurley Gill是高级应用和系统工程师Kollmorgen他1978年毕业于弗吉尼亚理工大学工程专业,自1980年以来一直从事运动控制行业。可以通过电话联系到他(电子邮件保护).
自1916年成立以来,科尔摩根的创新解决方案使伟大的想法成为现实,使世界更安全,并改善了人们的生活。今天,它在运动系统和组件方面的世界级知识,行业领先的质量,以及在连接和集成标准和定制产品方面的深厚专业知识,不断提供在性能、可靠性和易用性方面无与伦比的突破性运动解决方案。这给了世界各地的机器制造商一个无可辩驳的市场优势,并为他们的客户提供了终极的安心。
欲了解更多信息,请访问www.kollmorgen.com。电子邮件(电子邮件保护),或叫(540) 633 - 3545.
了下:运动控制技巧




告诉我们你的想法!