

当在飞行上进行测量到离散产品时,动作系统最小化误差并对其余均正确进行测量。
布莱恩Handerhan|业务开发经理•生命科学
Patrick Lehr.|产品经理•精密力学
•派克汉尼汾公司
动态计量是关于移动机器轴上的物体数据的集合。它与基于激光的检查和光谱测量越来越常见,主要用于在各种过程中使用离散产品的线扫描的半导体和电子制造。生命科学应用,如细胞分析或DNA和基因测序 - 这需要高数据收集吞吐量 - 也采用动态计量。另一个应用是精密激光切割。
由于携带产品的阶段在测量过程中呈现运动,因此它们必须表现出最小的线性误差,ABBE错误和平面误差。这些错误的来源比比皆是 - 包括线性滑动和装配加工不一致,承载不一致,摩擦,偏转,热波动,反馈不一致和机械卷绕。

有关所有三种错误类型的更多详细信息可以找到blog.parker.com.条目和搜索动态计量。将错误保持到最小意味着最小化它们的来源 - 包括加工和承载不一致,摩擦,偏转,热波动,不一致的反馈和机械卷绕。
对于直线定位装置,工业用八种不同的方法来量化这种误差。阿贝误差出现在俯仰、偏航和横摇方向;它们是精度和重复性的重要因素,可以通过角度测量进行量化。在X, Y,或Z方向的线性误差直接关系到精度和重复性,并由线性测量量化。相反,在多轴系统中,平面误差发生在X、Y或Z方向,并直接影响相邻轴。这些也可以用线性度量来量化。
一个特别注意:当测量点在距离阶段的一定距离乘坐测量点乘坐时,精度受到影响,并且当测量点从舞台上更远时,总误差更高。在这种应用中 - 兴趣点是距离俯仰,偏航或折叠点的距离 - 最小化ABBE误差是最关键的。设计工程师必须在为动态计量应用程序指定线性阶段时,必须考虑此类错误的放大。
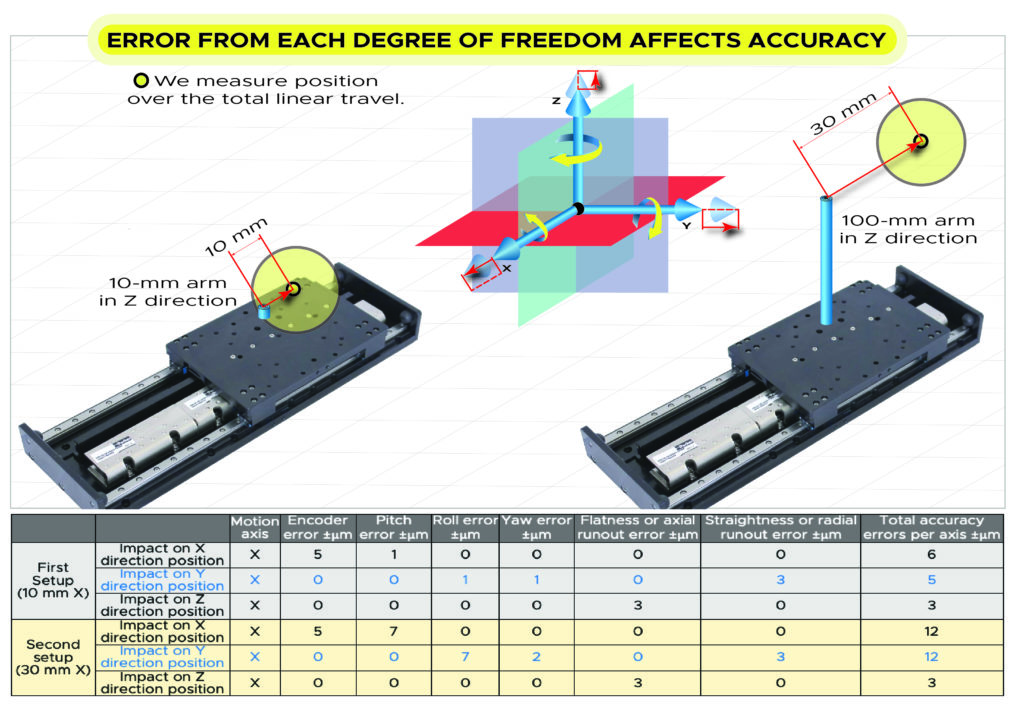
考虑两个操作,该操作包括从线性级的一定距离。当测量点从阶段遥远时,总误差更高。
运动控制补充了机械精度
动态计量还需要严格控制运动级速度。以意外加速和减速(如速度波动)形式出现的误差,使得在动态计量装置中不可能准确和一致地收集结果。扫描应用尤其需要良好的速度控制,否则可能会有数据收集不良(相对于预期位置)和结果模糊的风险。
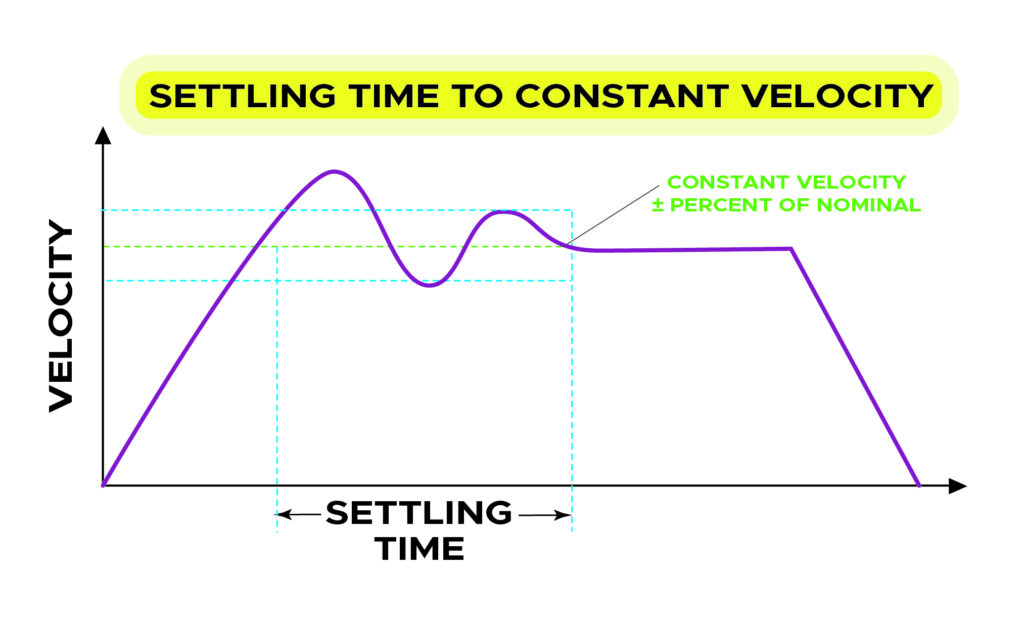
Velocity Control对于动态计量应用至关重要,因为后者取决于精确且一致的测量的平滑速度。
速度波纹的原因包括机械传动系统中的偏差;铅螺钉或滑轮间距变化;随着行程中风,摩擦变化。其他可能导致速度纹波的其他因素包括反馈装置中的精度误差,电机驱动器中的电流控制限制;PWM频率而不是线性放大器;和次优伺服算法和控制更新速率。
有几种方法可以减少级轴上的转矩脉动:在执行器上安装高分辨率线性反馈装置;在轴电机上安装一个非常低的细分误差(SDE)编码器;或采用伺服更新速率高的驱动器控制器。
在动态计量过程中保持速度稳定可以通过几种方式进行。一种选择是使用线性电动机致动器进行快速响应驱动器和速度校正SAN传动系统俯仰或摩擦问题。另一个是安装一个非常低的子分割误差(SDE)编码器 - 在编码器的硬计之间发生位置错误。否则,致动器上的线性反馈可能按顺序。有助于动态计量的另一种技术是具有高伺服更新速率的驱动控制器 - 能够快速测量和校正。
应用线性电动机驱动的阶段进行动态计量
大多数高速动态计量应用的致动是通过用线性电机驱动的阶段 - 特别是Inonless Linear Motors。因为在这种阶段中的线性电动机直接耦合到负载,所以最小化甚至完全消除了背表,效率损失和皮带和滚珠丝杠驱动的位置的位置不准确。
更重要的是,线性电机通常比其他传动系统更紧凑。这使得更小的机器具有更高的刚度——更低的位置误差和能够高速的轻量级设计。
线性电机执行器还保持最高速度的最紧固控制......甚至需要在某些情况下考虑编码器子分割误差和伺服位置控制循环。在寻址和优化的情况下,线性电机可以避免速度纹波问题以提供快速启动。以合理的商业成本,工程师可以优化系统以在积极的动态计量速度下实现误差为200nm。但要最大限度地减少速度波纹,工程师必须在指定编码器分辨率和伺服采样率之前具有应用程序的速度和采样率。
考虑一个应用程序在半导体市场中设计工程团队执行激光线扫描。假设该过程取决于平坦度和直线度 - 误差超过300×300mm的行驶区的误差超过±4μm。这里,来自一些制造商的X-Y系统中的宽碱单片阶段可以保持高刚度,以实现最小的平坦度和直线误差。
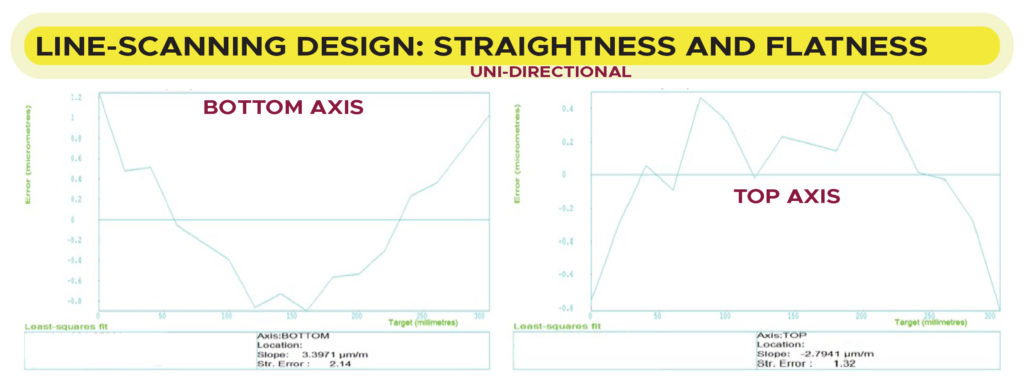
这绘制了两个阶段轴的错误。底轴目标精度为±4μm;实际精度远远优于±1.2μm。顶轴目标精度为±4μm;实际精度远远优于±0.8μm。
考虑另一个行扫描应用程序,并假设扫描频率为100hz。同时假设在10毫米/秒的冲程速度下,速度波动必须低于±2%。这意味着位置误差必须保持在±0.2 mm/秒/ 100hz -或0.002 mm/ 0.01秒。因此,在这里,舞台执行器需要一个分辨率超过允许的位置误差的编码器,至少一个2µm编码器。加上伺服更新速率必须至少是所需校正速率的十倍(0.01秒乘以10 = 1毫秒更新速率)。在这里,只有具有精密编码器和某些伺服驱动器和控制器组合的阶段才能将速度保持在要求之内。
实际上,只有线性电动机致动阶段可以满足动态计量的关键规范。寻找供应激光干涉仪测试报告的这些系统的供应商,以确认每个阶段优于其他动力传动系统机制并提供计量级性能。
Parker Hannifin |solutions.parker.com/lp=12738
提交:线性运动提示




告诉我们你的想法!