

微创手术(MIS)是一种现代技术,允许外科医生通过小切口(通常为5-15 mm)进行手术。尽管与较旧的外科技术相比,MIS有许多优点,但执行起来可能更困难。一些固有的缺点是:
- 由于腹腔镜直视器械和腹壁小切口的固定而导致的活动受限
- 由于二维成像,视力受损
- 长仪器的用法放大了外科医生震颤的影响
- 对外科医生施加的贫困人体工程学
- 触觉反馈的丧失,这是由仪器上的摩擦力和腹壁的反动力扭曲。
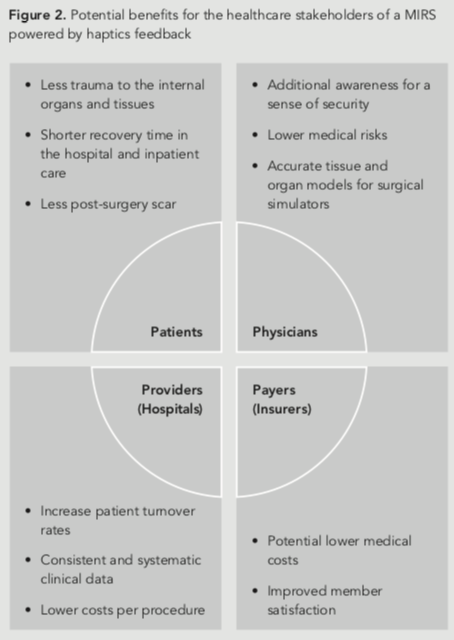
微创机器人外科(MIRS)提供了最小化或消除与传统腹腔镜手术相关的许多陷阱的解决方案。MIRS平台如直觉外科的达·芬奇2000年,美国食品和药物管理局批准了这项法案,这是外科治疗的一个历史性里程碑。利用腹腔镜手术的优势,同时增强外科医生的灵活性和可视性,消除长期手术的人体工程学不适感,这使得MIR无疑是患者、外科医生和医院的一项重要技术。
然而,尽管目前商业上可用的MIRS带来了所有的改进,触觉反馈仍然是一个主要的限制机器人辅助外科医生。因为干预者不再直接操作仪器,自然的触觉反馈被消除了。触觉是动觉(肌肉、组织和关节的形态和形状)和触觉(皮肤纹理和细节)感知的结合,是许多物理变量的结合,如力、分布压力、温度和振动。
感应手术末端效应器中的相互作用力的直接益处是:
- 改进的有机组织表征和操作
- 解剖结构评估
- 缝线断裂复位术
- 整体上增加了机器人辅助手术的感觉。
触觉反馈也在缩短MIRS培训中的年轻外科医生的学习曲线方面发挥着重要作用。准确实时直接力测量的三级益处是,可以利用从这些传感器收集的数据来生产用于MIS训练的外科模拟器的精确组织和器官模型。Futek先进传感器技术一家位于加利福尼亚州欧文市的传感器制造商,分享了这些关于如何为外科机器人平台设计和制造触觉传感器的技巧。

通过力量,扭矩和压力传感器能够与外科医生的手中的触觉反馈,可以以更高的精度和灵巧进行机器人微创手术,同时最小化对患者的创伤。|信贷:犯罪分子
触觉反馈的技术和经济挑战
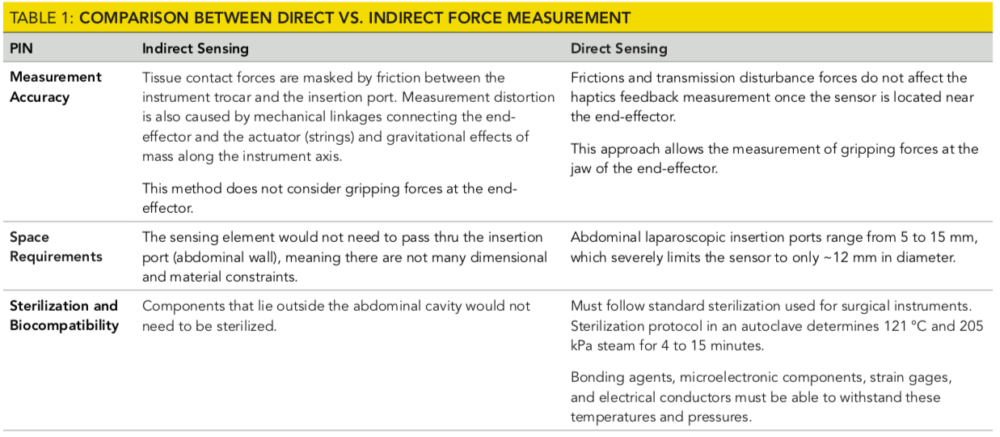
增加了测量触觉,工程师和神经科学家的固有复杂性也面临着在传感器设计和制造阶段之前需要考虑的重要问题。The location of the sensing element, which significantly influences the measurement consistency, presents MIRS designers with a dilemma: should they place the sensor outside the abdomen wall near the actuation mechanism driving the end-effector (a.k.a. Indirect Force Sensing), or inside the patient at the instrument tip, embedded on the end-effector (a.k.a. Direct Force Sensing).
这两种方法的优缺点与测量精度、尺寸限制以及灭菌和生物相容性要求有关。表1比较了这两种测力方法。
在MIRS应用中,非常精密的仪器-组织相互作用力需要向外科医生提供精确的反馈,测量精度是必不可少的,这使得腹腔内直接传感成为理想的选择。
然而,这种新方法不仅带来了如表1所示的设计和制造挑战,而且还要求更高的可重用性。市面上出售的MIRS系统采用模块化设计,可使腹腔镜器械重复使用约12至20次。在末端执行器附近添加传感元件必然会增加仪器的成本,在设计阶段需要进一步考虑,以提高传感器的重复使用性。
适当的电子元件,应变测量方法和电气连接必须承受额外的可高压灭菌循环以及在高pH洗涤中存活。应对这些特殊的设计要求总是增加每个传感器的单一成本。然而,扩展的寿命和循环次数因此降低了每周期的成本并为直接测量方法带来了财务负担能力。
高精度子微型负荷感测元件的密闭性同样挑战腹部直接力测量。密封电子元件的常规方法是采用共形涂层,其广泛用于潜水装置中。尽管该解决方案提供了用于消费电子产品的低压水浸环境中的保护,但涂层保护不充分气密,不适合高可靠性,可重复使用和可杀菌的解决方案。
在极端过程控制下,保形涂层显示出边缘并提供20至30个高压釜循环。高压灭菌过程具有使用高压和高温饱和蒸汽的骚扰物理化学环境。与氦泄漏检测技术类似,与水颗粒相比,饱和蒸汽颗粒的尺寸要小得多,并且能够随着时间的推移穿透和降解涂层,导致装置以几乎可预测的方式失效。
实现密封性的替代和传统方法是焊接在传感器的报头接口上。同样,由于其尺寸约束,焊接面向小型化传感器中的障碍物。总而言之,一种新颖且鲁棒的方法是使用定制配方,CT匹配,化学中性,高温熔合隔离器技术的单片传感器,用于通过气密密封的主动传感元件的壁馈送电导体。融合隔离器技术在数百到数千次的高压灭菌周期中显示了可靠性。
![]()
机器人报告启动医疗机器人工程论坛(12月9日至10日在圣克拉拉,加利福尼亚州)。会议和世博会侧重于改善下一代医疗机器人的设计,开发和制造。医疗机器人工程论坛目前正在接受口语提案2019年7月26日,。提交提案,填写这种形式。
触觉反馈的其他设计考虑因素
如前所述,微型化、生物相容性、高压灭菌性和高重用性是手术环境对触觉传感器施加的一些独特特性。此外,设计人员也必须满足任何高性能力测量设备所固有的要求。
外来载荷(或串扰)补偿,为轴外负载提供最佳抗性,以确保最大的使用寿命并最大限度地减少读取误差。力和扭矩传感器设计成沿笛卡尔轴捕获力,通常是X,Y和Z.从这三个正交轴,一到六个测量通道导出三个力通道(FX,FY和FZ)和三个扭矩或力矩通道(mx,我和mz)。从理论上讲,沿着其中一个轴施加的负载不应在任何其他通道中产生测量,但情况并非总是如此。对于大多数力传感器,这种不期望的交叉通道干扰将在1到5%之间,并且考虑到一个通道可以捕获来自其他五个频道的外来载荷,总串扰可以高达5%至25%。
在机器人手术中,传感器的设计必须能够消除外部或串扰负载,包括末端执行器器械和套管针之间的摩擦、来自腹壁的反作用力以及器械轴上质量的重力效应。在某些情况下,微型传感器的空间非常有限,必须使用电子或算法补偿等替代方法来补偿侧面负载。
 直线力传感器的校准也会施加限制。校准夹具用SR按钮进行了优化,以精确地通过该部件的传感器直接负载。如果校准组件不配备这种布置,则最终校准可能受平负载路径的影响。
直线力传感器的校准也会施加限制。校准夹具用SR按钮进行了优化,以精确地通过该部件的传感器直接负载。如果校准组件不配备这种布置,则最终校准可能受平负载路径的影响。
热效应也是应变测量中的主要挑战。温度变化导致材料膨胀,量因子系数变化和对测量结果的其他不期望的影响。因此,即使在暴露于严重的环境温度振荡时,温度补偿也可以确保精确度和长期稳定性。
消除温度对读数影响的措施有:
- 使用与传感元件材料热膨胀系数兼容的高质量、定制和自补偿应变计
- 使用半或全惠斯通电桥电路配置安装在两个负载方向(张力和压缩),以纠正温度漂移
- 零平衡和输出范围的完全内部温度补偿,无需外部调节电路。
在一些特殊情况下,使用具有缩小焊接连接的定制应变计有助于降低焊点的温度影响。通常,具有四个单独的应变计的常规力传感器具有16个焊点,而定制应变元件可以将其降低到少于六个。这种设计考虑因焊点而改善了可靠性,因为失败的机会显着降低。
在设计阶段,还必须考虑这样的传感器,以满足高可靠性,以及高容量的可制造性,考虑到设备和工艺,将需要一个设备被指定用于大批量制造。自动化、高产量工艺可能与用于生产低产量的台式或原型设备略有或显著不同。可扩展性必须将重点放在减少制造过程中的故障点以及现场可能出现的故障点上。
医疗应用的测试与可以承受大量循环而不是抵抗剧烈结构应力的测量装置的能力更有关系。特别是对于医疗传感器,重载和疲劳测试必须与闭合过程中的灭菌测试结合进行,具有几个疲劳和灭菌测试。在保持密封性的同时存活数百个过载循环的能力转化为具有较低MTBF和更具竞争力的总体拥有成本的无故障,高可靠性传感器。
信贷:犯罪分子
产品开发挑战
虽然理解触觉蒸压传感器固有的设计挑战是势在必行的,但传感器制造商必须配备有一个有才华的多学科工程团队,内部制造能力,充分开发的质量过程和产品/项目管理能力,以处理复杂的,资源有限,且快节奏的新产品开发环境。
多学科方法将产生满足非线性、滞后、重复性和串扰规范的传感器元件,以及提供模拟和数字输出、高采样率和带宽、高无噪声分辨率和低功耗的电子仪器,这两者对于可靠的交钥匙触觉测量解决方案同样必要。
对所有制造过程(机加工、层压、布线、校准)的战略控制,允许制造商以可制造性(DFM)的思路设计传感器。这种制造的战略控制可以归结为有条不紊地选择材料清单,定义测试计划,遵守标准和协议,并最终基于经济约束制定制造阶段的战略。
根据以下文件提交:机器人报告那机器人•机器人夹具•终点效果那传感器(压力)




告诉我们你的想法!