


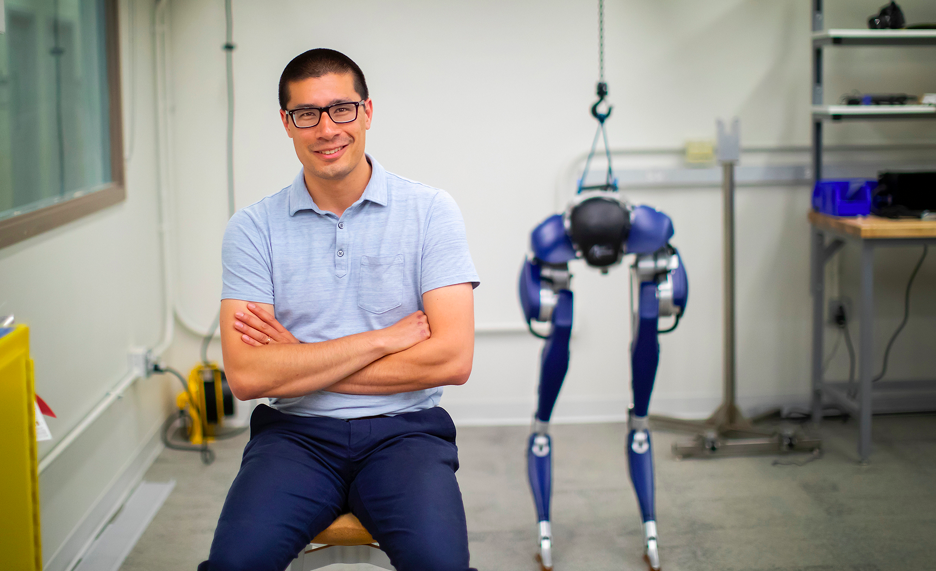
迈克尔·波萨(右)和研究生陈宇明在宾夕法尼亚大学动态自主和智能机器人实验室工作,他们利用凯西开发更好的算法,帮助机器人像人一样移动。图片来源:Eric Sucar
什么东西有两条腿,没有躯干,在宾夕法尼亚大学Towne大楼的地下室里闲逛?
这是凯西,一个动态双足机器人,迈克尔·波萨的新成员动态自主与智能机器人实验室.建造的敏捷的机器人Cassie为波萨和他的学生提供了一个机会,让他们在一台设备上创造和测试他们正在开发的运动算法,这台设备和他们的想法一样先进。
“我们真的很激动。它为我们提供了商业市场上完全不同的能力,”工程与应用科学学院的机械工程师Posa说。“现有的选择并不多,这意味着每个想要进行步行研究的实验室不必花三年时间制造自己的机器人。”
有了凯西,波萨的实验室成员就可以把所有的时间花在解决设计算法的巨大挑战上,这样机器人就可以在各种地形和环境中行走和导航。
“我们拥有的是一个真正为动态运动设计的系统,”他说。“在腿部运动方面,我们得到了非常自然的速度,比如抬起一只脚,然后把它放在其他地方。对我们来说,这是一个非常棒的系统。”
波萨谈到Cassie时说:“它为我们提供了商业市场上完全不同的功能。”图片来源:Eric Sucar
为什么腿很重要?因为它们极大地扩展了机器人的能力。“你可以想象,有腿的机器人比轮式机器人有一个关键优势,那就是它们能够进入非结构化环境。它们可以穿越相对崎岖的地形,进入房屋,爬上一段楼梯。这就是有腿机器人的长处,”波萨说。“这在各种应用中都很有用,包括基本的勘探,但也包括灾难恢复和检查任务。这就是如今吸引了很多业界关注的地方。”
当然,在不同的地形上行走,或者爬上路缘、台阶或其他斜坡,会极大地增加机器人保持直立的能力。想想当你走路的时候会发生什么:你的胳膊肘撞到什么东西,你的身体必须翻转以避免撞倒它,同时保持身体稳定以避免往相反的方向坠落。
机器人必须被要求做所有这些事情——这就是波萨的算法的用武之地,从凯西每走一步脚往下的地方开始。
他说:“即使只有腿,你也必须决定把脚放在哪里。”“这是一个非常难以处理的决定,因为一切都取决于你在哪里、什么时候把脚放下去,把脚放下去会产生影响:你转移重心,这会改变你的平衡,等等。”
“这是一个迅速发生的离散事件。从计算的角度来看,这是我们真正纠结的问题之一——我们如何处理这些接触事件?”
接下来的问题是如何建模你想让机器人做什么。简单的建模认为机器人是一个在空间中移动的点,而不是一个腿上有六个关节的机器。当然,机器人不是一个点,使用这些模型意味着牺牲性能。波萨的实验室正试图建立更复杂的模型,从而使机器人移动得更平稳。
“我们感兴趣的是中间地带,即‘这个机器人有12个不同的马达’和‘这个机器人是空间中的一个点’之间的适居环境,”他说。
相关:2019年是有腿机器人年
Cassie的前身被称为ATRIAS,是“假设机器人是一个球体”的首字母缩写。Posa说,ATRIAS允许更复杂的模型和更多的能力来指挥机器人,但仍然太简单。“真正的机器人总是不同于一个点或一个球体。问题是,我们的模型应该在这个范围内处于什么位置,从非常简单到非常复杂?”
DAIR实验室的两名研究生一直在研究这些算法,在模拟中测试它们,最后在Cassie上测试。大部分工作是虚拟的,因为Cassie实际上是用来测试通过模拟测试的部件。
波萨指着实验室对面的一台电脑说:“你在那里写代码,然后按下开关,用真正的机器人运行它。”通常情况下,如果它在模拟器中不起作用,那么它在现实世界中也不会起作用。”

包括陈(左)在内的研究生们致力于设计新的算法,并在对Cassie进行测试之前进行计算机模拟。图片来源:Eric Sucar
研究生陈宇明(音译)说,在电脑上,研究人员可以承担更多的风险。“我们不会在模拟中破坏机器人,”他笑着说。
所以当你用这些腿旋转时会发生什么?基本的动作是行进式的步伐,卡西的金属脚在地板上叮当作响。但即使机器人做了这些简单的动作,也很容易看到关节和部件是如何一起工作的,从而从腰部以下打造出一个逼真的有腿身体的复制品。
以Cassie为平台,Posa说他很高兴看到他的团队如何推动运动研究向前发展。
他表示:“我们希望设计算法,使机器人能够以安全、高效的方式与世界互动。”“我们希望(机器人)以一种高效、充满能量的方式行走,这样它就可以走很长的距离,并且以一种对机器人和环境都安全的方式行走。”
编者按:这篇文章被转载于宾夕法尼亚大学.
了下:汽车,学生项目,机器人的报告,机器人技术•机器人抓手•末端执行器




告诉我们你的想法!