

很少有线性运动的应用,其中的负载是完美的中心在支承轴承。相反,大多数应用都涉及到悬臂式的载荷,这意味着它们偏离了轴承并产生了弯矩载荷。
在这种情况下,术语“轴承”可以指单个轴承或轴承系统-例如,两个平行的轨道,每个有两个轴承,共同支持一个负载。
由悬臂载荷(或驱动力)引起的瞬间在轴承上产生两个反作用力,其幅度相等且相反。这些反作用力乘以轴承的摩擦系数,确定反对轴承运动的摩擦力。为了使轴承移动,驱动力必须大于摩擦力;否则,发生绑定或缺乏运动。逆行地,克服绑定的解决方案不是施加更大的驱动力。解决方案在于通常称为2:1的比例(也称为“2:1的规则"或"绑定比率”)。
图像信用:PBC线性
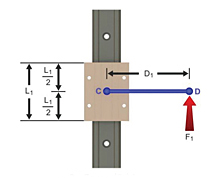
2:1的比例是轴承的长度和悬臂荷载(或驱动力)离轴承的距离之间的关系。实际上,2:1的比例并不总是2:1。如下式所示,力矩臂距离(D1)和轴承长度(L1),这取决于轴承的摩擦系数(μ)。
![]()
使用普遍接受的摩擦系数为0.25对于滑动轴承,比率为2:1。如果摩擦系数较低,例如在0.10处,则该比率为5:1。如果它更高,则在0.50处,例如,该比率变为1:1。
这就是为什么再循环轴承很少经历悬臂载荷的结合问题 - 它们的摩擦系数通常约为0.001,因此时刻臂与轴承长度的可接受比率为500:1。
本白皮书从PBC线性提供了对轴承上的力的分析,并给出了2:1比的完全推导。
如上所述,当超过2:1的比率时,施加较大的驱动力不会导致轴承移动。抵消绑定的唯一方法是1)缩短时刻臂距离,2)增加轴承的长度,或3)减小摩擦系数。
普通轴承系统的重要设计指南如下:当使用两个轨道或轴时(如下面所示的2轨,4支承装置),安装在轨道上更靠近悬臂的负载(或驱动力)应该是固定的,并且安装在轨道上的轴承越远离悬臂式负载(或驱动力)应该浮动。固定浮动装置允许轴承系统补偿小的错位并有助于防止不必要的磨损。
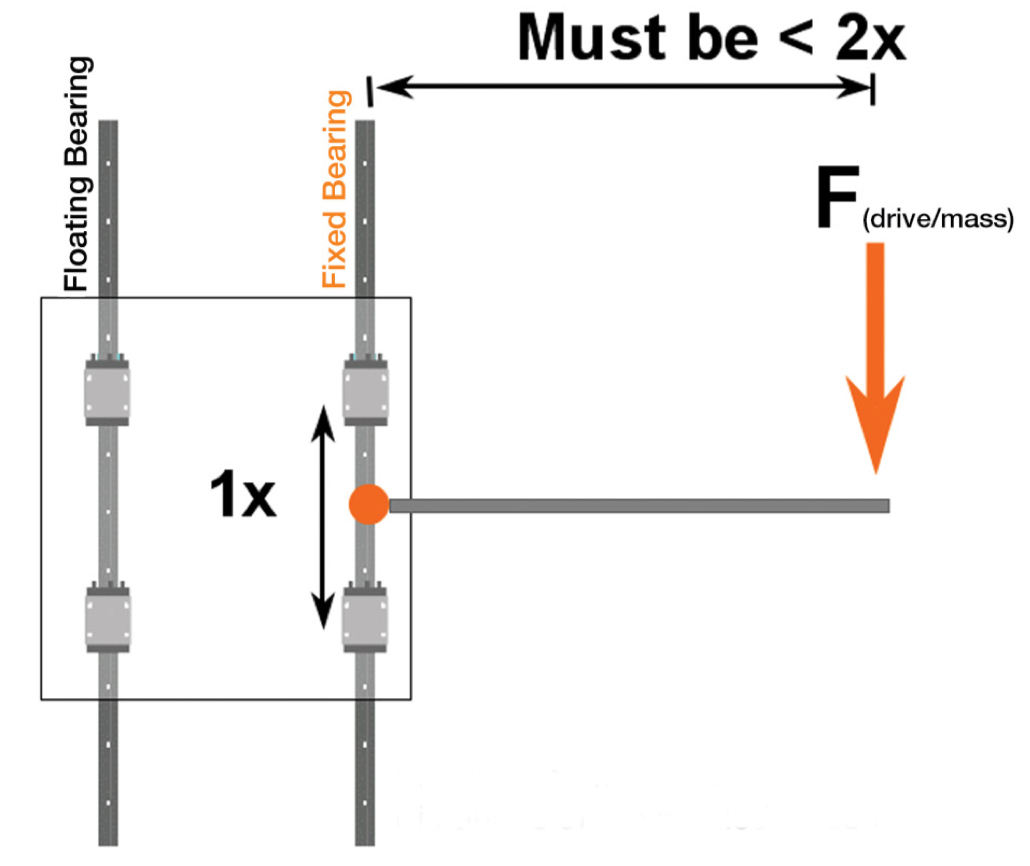
在一个2轨,4轴承的装置中,应固定最靠近悬臂载荷或驱动力的两个轴承,并且其他轴承应该浮动。
图片来源:易格斯
绑定或粘滑运动吗?
装订有时会被混淆stick,但两个条件不一样。绑定是完全防止运动,而粘滑是间歇性的,或“生涩,”运动。除了通常的未对准和意外的过程力量的罪魁祸首外,可能导致粘滑运动的另一个因素是静态和动态系数之间的差异。对于普通轴承系统尤其如此,因为与再循环轴承不同,滑动轴承往往具有明显不同的静态和动态系数的摩擦系数,其静态和动态的摩擦系数非常相似。
特征图像编号:igus
了下:线性运动技巧,轴承,运动控制•电机控制




告诉我们你的想法!