

卡斯特研究人员从左边作为机器人的模型探索人类大脑:ph.d.候选人苏金安,吉挂李博士,桑万李教授。来源:凯斯特
韩国高级科技学会研究人员(卡斯特),剑桥大学,日本国立信息与通讯技术(NICT),和谷歌深信人认为,我们人类如何做出明智的决策的理解,现在已经达到了一个临界点。机器人智能可以通过模仿策略,人脑的用途,当我们在我们的日常生活中做出决定,他们上周表示将显著增强。
在我们快速变化的世界,人类和自主机器人需要不断学习和适应新的环境。但不同的是,人类能够根据特殊情况作出决定的,而机器人仍然依赖于预定数据做出决策。
在加强机器人的物理能力方面取得了快速进展。然而,他们的中央控制系统,该系统控制机器人在任何时候如何做好事,仍然不如人类。特别是,他们经常依靠预先编程的指示来指导他们的行为,缺乏人类行为的标志,即快速学习和适应的灵活性和能力。
运用神经科学机器人脑中
在机器人应用神经科学教授从生物和脑工程系在KAIST和本·西摩教授来自剑桥大学的桑万肋娥和NICT提出了机器人应根据人类大脑的原理来设计的情况下。他们认为,机器人智能可以通过模仿策略来显著增强期间在日常生活中的决策过程,人脑的用途。
将人类智能导入机器人的问题一直是一项艰巨的任务,而不知道人类大脑如何做出决定的计算原则 - 换句话说,如何将大脑活动转化为机器人“大脑的计算机代码”。
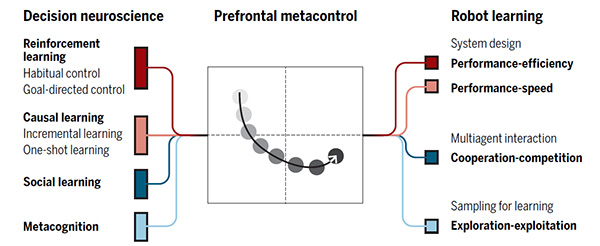
脑启发的解决方案,以机器人学习。学习和认知收敛的各个方面和神经科学的观点创建一个名为“前额叶metacontrol”,它可以激发研究者设计学习代理商机器人等性能效率,速度,合作,竞争,勘探开发面临的主要挑战新思路权衡(科学机器人)
然而,研究人员现在争辩说,在计算神经科学领域的一系列最近的发现之后,有足够的这个代码可以将它有效地写入机器人。发现的一个例子是人脑的“元控制器”。它是大脑决定如何在不同子系统之间切换以执行复杂任务的机制。
另一个例子是人类疼痛系统,这使得他们能够保护自己在有潜在危险的环境中。
“复制大脑的代码可以大大提高机器人的灵活性,效率和安全性,”李教授说。
跨学科的方法
该团队认为,这种跨学科的方法将为神经科学的良好效益提供给机器人学。最近对焦虑,抑郁和成瘾等精神病疾病的爆炸性爆发的爆炸已经引起了一套复杂的理论,这些理论是复杂的,没有某种先进的情况平台。
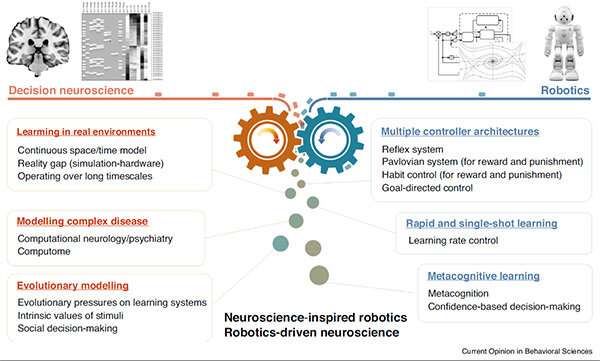
神经科学,机器人技术概述接近的决策。该图详细介绍了跨学科研究重点领域(行为科学目前的意见)
“我们需要模拟人类大脑发现它如何与现实生活世界交互,以测试是否以及在这些模型中异常如何不同引起某些疾病的一种方式,”西摩教授解释说。“举例来说,如果我们能再现一个机器人的焦虑行为或强迫症,然后我们可以预测什么,我们需要做的,对待它的人。”
该团队预期,生产不同精神疾病的机器人模型,以类似于研究人员现在使用动物模型的方式,将成为临床研究的关键未来技术。
同情机器人
该小组还指出,也可能存在于人类和智能机器人等优点学习,表演,并以同样的方式表现。在未来的社会中,人类与机器人的生活和工作相互之间的合作能力,如果我们觉得他们认为像我们这样同情的机器人可能会大得多。
“我们可能会认为有机器人具有是有点冲动的人的特征或谨小慎微将是不利的,但这些特质是一个不可避免的副产品的类似人类的智慧,”西摩教授说。“而事实证明,这是帮助我们理解人类行为的人。”
实现这个脑血淋力的框架人工智能刊登在两种期刊,科学机器人1月16日和行为科学目前的意见2019年2月6日。
提交:AI•机器学习那机器人报告那机器人•机器人夹具•终点效果




告诉我们你的想法!