

用于伺服应用的联轴器通常将精密驱动器连接到敏感负载,因此它们不会引起任何误差。这就是为什么服务耦合应该是零回差的原因——以防止时间和可预测性问题(更不用说由于锤击倒转轴而导致的故障)。用于伺服应用的联轴器还必须具有高扭转刚度,同时给予旋转轴的偏差(在规格范围内)轻微的宽恕,即使在保持传输转速稳定到电机输出转速的同时。

应用示例礼貌的游戏企业
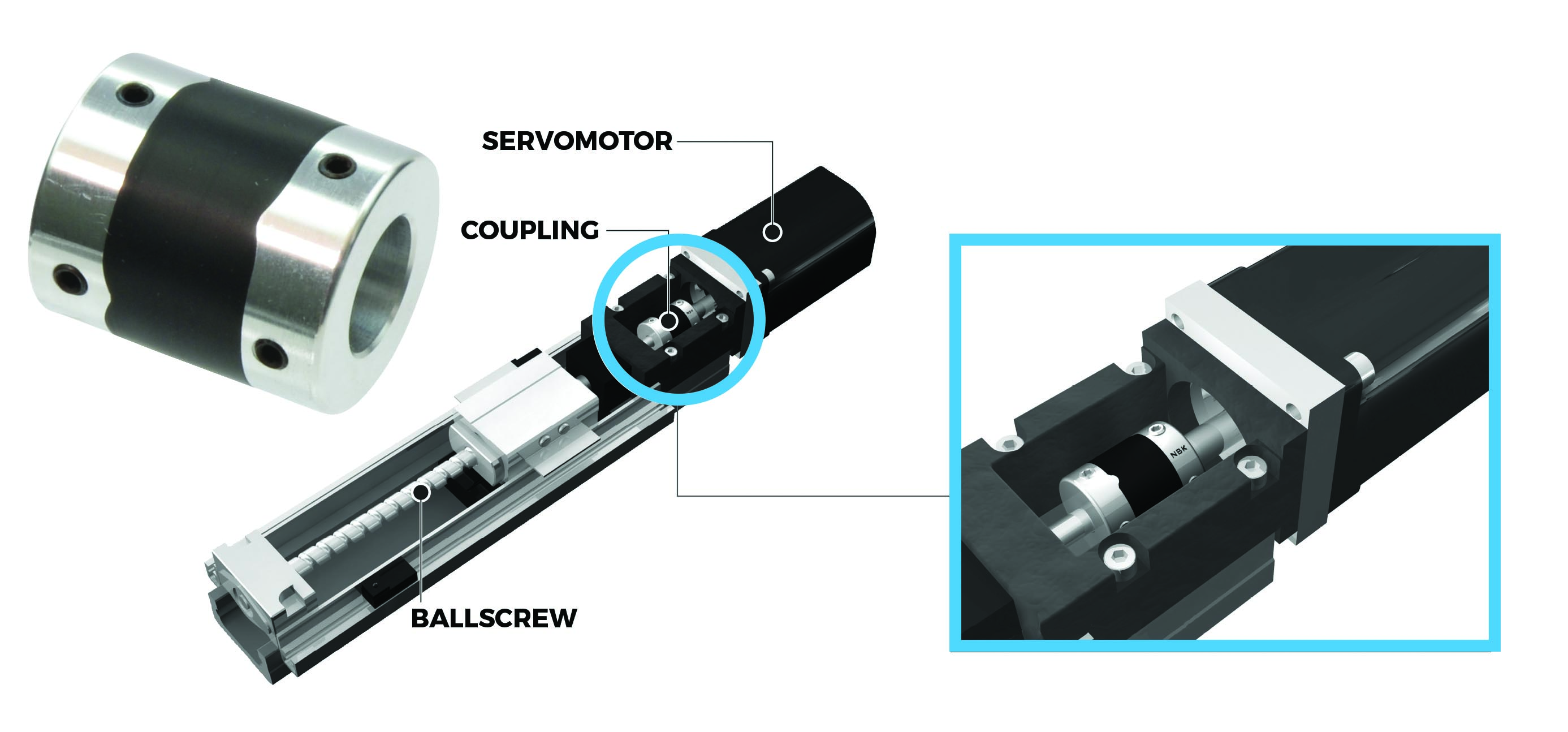
但这些只是一对伺服耦合的考虑因素。考虑伺服耦合的典型应用 - 将伺服电机连接到滚珠丝杠。这里,具有低惯性的联轴器使轴提供更快的加速和减速,而不会不必要地降低整体系统效率。
事实上,用于伺服设计的联轴器必须经常补偿微妙的动力传输问题,以将误差最小化到1弧分钟。或更低。这在伺服系统采用精确定位轴的形式时尤其正确。
这里有一个更完整的参数列表,需要考虑在这样的设计中适当的耦合操作:
1.耦合类型:耦合不应该是指定的最后一个运动组件,因为适当的伺服机功能依赖于具有合适的耦合到位。扭转刚性选项(运动设计的理想选择)包括特种波纹管联轴器,橡胶 - 钳口联轴器和圆盘联轴器。
弯颚式联轴器具有良好的阻尼特性,可以优化快速加减速轴的性能。在其他地方,无论是盘型联轴器和某些波纹管联轴器优越的高速轴。其他产品也可以服务于其他设计目标。关于联轴器类型有一个注意事项:永远不要用刚性联轴器来替换轴上的弹性服务联轴器,因为后者似乎经常发生故障。在这里,这个问题最有可能是电机输出轴和动力系统下一个组件之间的校准不足。有时存在一种误解,认为刚性耦合异常强大,因此可以解决此类情况下的问题。事实上,刚性联轴器只能在轴完全对齐时工作,因为这些联轴器传递连接的运动组件(可能极端)的力,产生不对齐。
半导体,机器人,医疗,自动化和其他精密机械行业使用设备具有最新的伺服电机技术,可满足性能标准。但随着增益设置的增加,精确精度和速度是关键的......而且耦合技术必须提前,以确保峰值伺服系统性能。应用图片礼貌NBK America
2.扭矩(和速度)的尺寸:在指定耦合类型后,设计工程师必须选择耦合大小。这严重依赖于轴速度(rpm),轴的扭矩水平必须传输,并且应用程序需要的服务因子。传输稳定扭矩的轴更简单以指定;相反,传输可变扭矩需要额外考虑的轴。在此,定义申请的平均工作扭矩和峰值扭矩。(也考虑下面列出的“能够处理逆转的能力”中列出的参数。)
一个提示避免伺服耦合超大:在这些值上量化实际系统要求和基本耦合选择 - 并避免通过连接的齿轮电机的峰值扭矩输出定义整个轴。
3.刚度:随着位置,力或输出速度的严格控制,保持高效率通常是必不可少的。展示卷绕或间隙的联轴器降低了这种效率,因为它们必须克服每个移动循环的负载惯性。这可以是一些设置中的重要缺点......这就是为什么(特别是在采用刚性联轴器的轴上)应防止由于飞轮而无意中发挥作用。
请注意,如果耦合的扭转刚度不足,则其他系统功能必须补偿。一个标准解决方案是调整PID控制并降低伺服增益,但降低系统响应和性能。相反,过度扭转刚度会损害轴且轴承受快速逆转载荷的能力。这是因为具有过度刚度的伺服耦合可能是脆弱的,并且易于在苛刻的轴上失效,必须频繁和突然定向逆转。
伺服应用提示:刚度的平衡耦合特性。过度扭转刚度可能会诱导过早失效。另一方面,必须保持定时(用于定位命令)的轴,这些轴涉及扭转僵硬的联轴器。
4.惯性:如上所述,出于几个原因,这是一个重要参数。具有特别激进的运动型材的应用依赖于大部分内容的低伺服耦合惯性。
5.阻尼能力:碟形联轴器,某些波纹管联轴器和高增益橡胶型联轴器都是基于联轴器的伺服应用阻尼的选择。事实上,近年来,最苛刻的伺服应用已经提高了响应频率……但在使用扭紧联轴器的组件上,振动(和搜寻)出现了高增益设置。指伺服联轴器:刚度,阻尼,狩猎和稳定考虑在couplingtips.com有关更多信息。
6.轴连接:大多数伺服联轴器连接轴与夹紧或锁定机制(而不是键槽)。虽然键槽通常是防止轴打滑的一种选择,但事实上,它们可能是一种负担——增加轴连接的应力集中,不必要的成本,不平衡的风险,以及其他潜在的缺点。读圆锥形夹紧枢纽为高扭矩应用添加保护有关更多信息。
7.处理逆转的能力:必须快速定向变化的伺服应用需要特殊考虑。在这里,考虑与系统惯性开始和停止相关的扭矩。服务因素通常可以量化该值对装配动态的效果。逆转负载考虑的另一个方面是偶联材料疲劳。请记住,一些伺服耦合,在常规应用中,在逆转条件下被迫在几周内或更早的时间内失败。
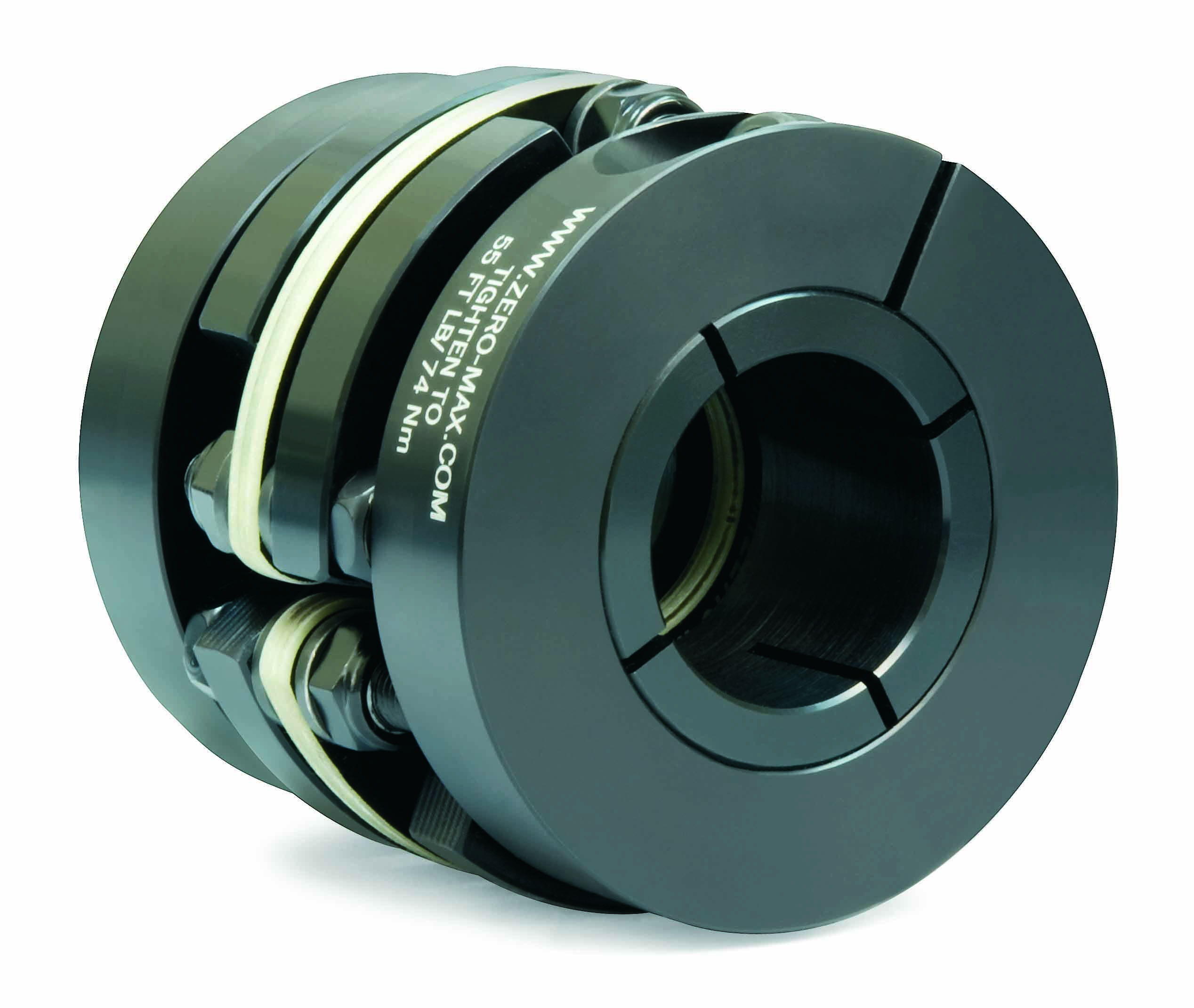
这是高速和高扭矩伺服电动机和运动控制应用的零最大复合盘(CD)耦合。CD联轴器具有高动态负载容量,并且在精确定位中的Excel即使在制造高速逆转的轴上也是如此。虽然其他设计的可比耦合可能具有高扭转刚度,但是一些太脆性以承受这种逆转。
8.函数来保护更昂贵的子组件:尽管系统故障最佳避免,但是可以设计联轴器,以防止轴致动器或电机和齿轮箱,如果有机器崩溃或灾难性过载。这在高速伺服应用中特别有用,其中基于驱动的电流限制并不足够快,以解决与动力传动系统相关的现有动能,并在堵塞或突然的冲击时加载。
9.对允许的错位的一种现实理解:灵活的联轴器为伺服应用做调整不对准。然而,oem必须对给定轴的允许偏差水平保持现实的态度,并规定组装技术和安装,以确保水平超过联轴器的额定值。否则,可能发生耦合或其他组件故障。

波纹管联轴器必须安装在适当的长度(不在张力或压缩下)。RULAND MFG。CO.制作这种波纹管联接适用于需要最小位置误差的高扭矩应用。这些联轴器具有低惯性,以维持系统响应性,并且均衡到应用程序中的Excel,即使是10,000 rpm。一个警告是,这些波纹管联轴器是不耐受暴露于未对准或冲击载荷。
了下:运动控制提示




告诉我们你的想法!