


从应用运动产品步进电机和驱动器
这里概述的错误是埃里克·赖斯,全国营销总监应用运动产品,已被世界各地成千上万的步进电机用户纠正了无数次。在给出的解决方案中避免这些错误,从而使您的下一个应用程序成功。
步进电机提供自动化行业的成本有效且简单的方法,以在宽范围的应用的数字控制动作 - 包括包装设备,3D打印机,材料处理和分类线,台式CNC机器,等等。它们用作许多旋转和线性定位轴的关键部件。
步进电机的性价比优势在于其简单性和在开环控制方案中精确定位的能力,而不需要从电机到控制器的任何反馈。要获得开环步进系统的最佳性能效益,需要了解如何指定和安装步进电机到应用程序。以下是步进电机用户,无论新手还是有经验的人,都可以轻易避免的六个常见错误。
1.“电机的扭矩比我实际看到的要高。”
在计算应用程序中移动负载所需的转矩后,用户根据(1)电机的保持转矩规格或(2)速度-转矩曲线选择步进电机。一旦安装和耦合到负载,电机不会产生预期的扭矩量。
第一个错误是使用保持力矩作为性能的衡量来指定步进电机。保持扭矩定义了电机在什么时候产生的扭矩维持的位置,而不是移动。它一般是移动时的电动机产生的转矩的差指示。
当步进马达开始移动,所产生的转矩,从保持扭矩值下降急剧,即使经过短短的RPM。随着速度的增加,转矩进一步下降。出于这个原因的基础上,保持转矩本身并不能选择一个电机。相反,参见刊登速度扭矩曲线。
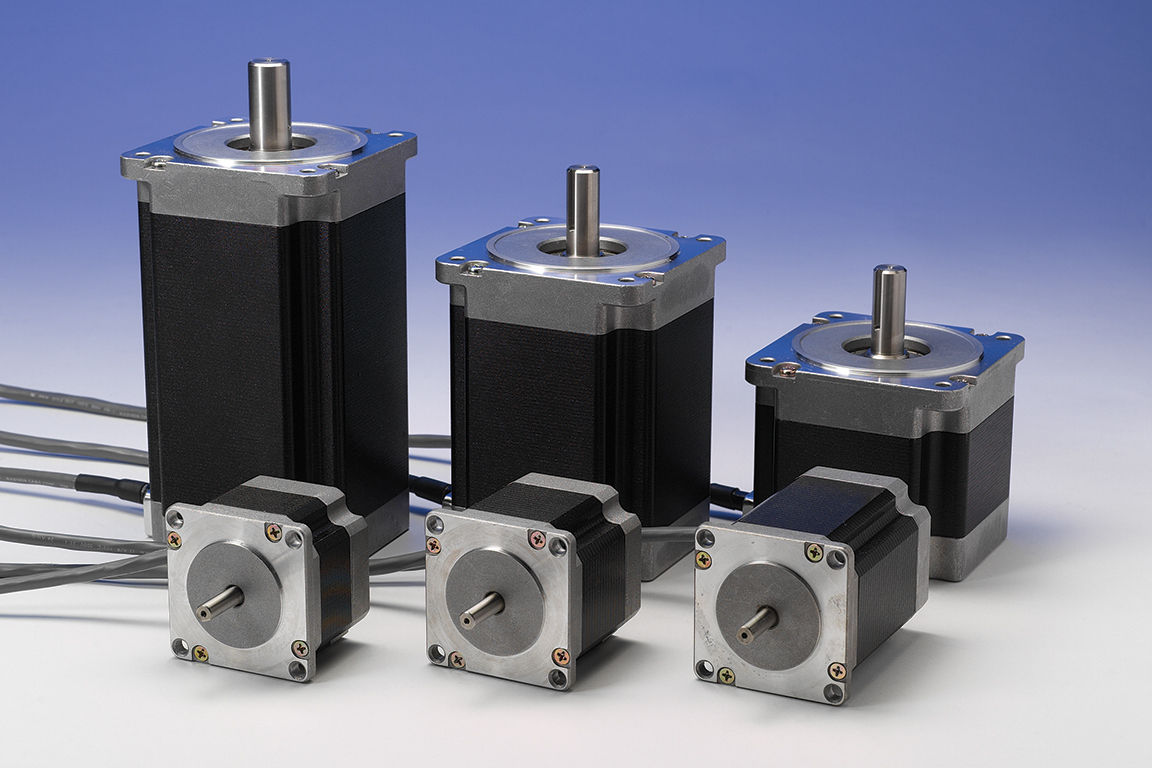
这里显示的是来自Applied Motion Products的不同堆栈长度的步进电机。
第二个错误是没有理解速度-扭矩曲线的本质。速度-扭矩曲线表示步进电机停止时的扭矩。当电机停止转动时,转子与定子失去同步,轴停止转动。
为了确保步进电机继续转动并提供足够的扭矩来移动负载,请通过估计安全裕度来评估速度-扭矩曲线。一个简单的方法是想象一条平行于速度-扭矩曲线的线,大约在公布曲线高度的1/2到2/3处。这条假想线表示步进电机在最小失速风险下能够可靠地产生的扭矩量。看到图1下文,了解这一点。
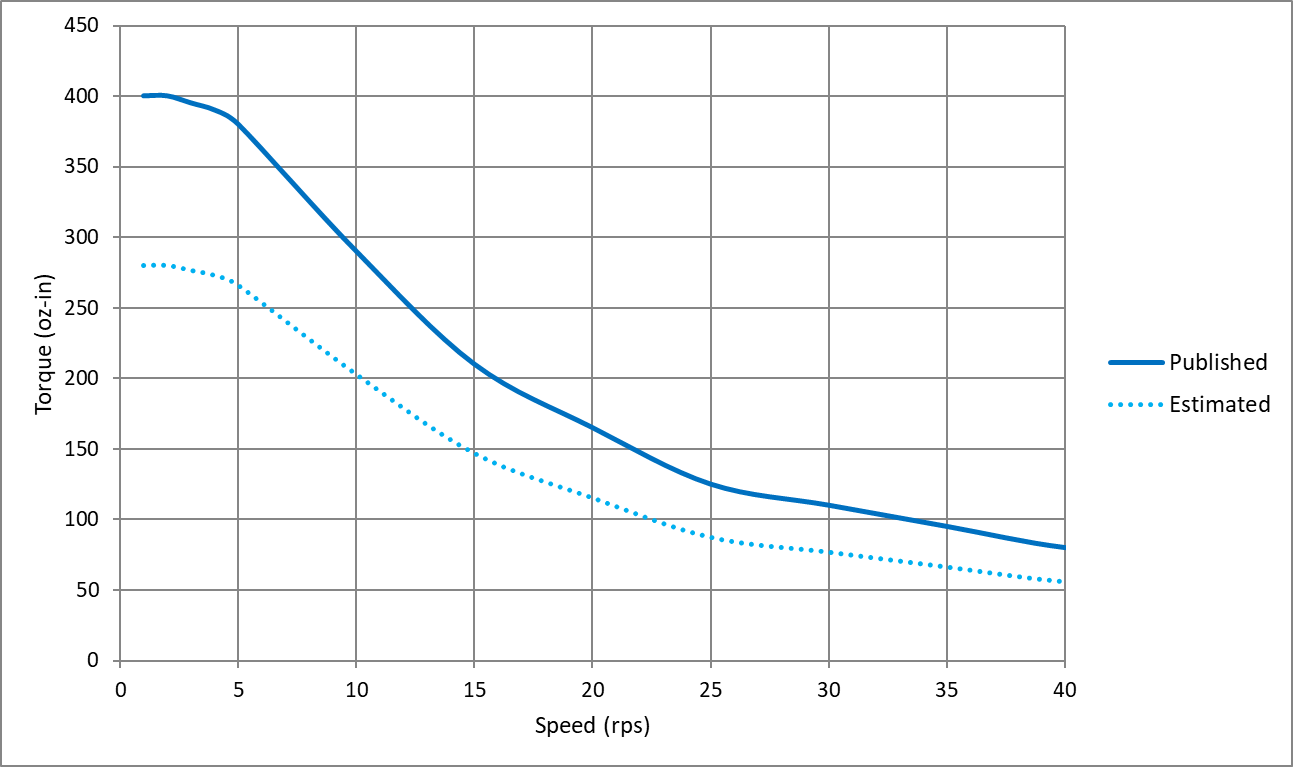
图1 -步进电机的典型速度-扭矩曲线。在制造商公布的数据中,只有实线显示,这表明失速扭矩与速度。用户必须估计可用的扭矩范围,如虚线所示。
2.“步进电机这么热;一定有什么不妥的地方“。
步进电机的设计热运行。在步进电机中所使用的最常见的绝缘等级是B类,其额定工作高达130℃,这意味着一个步进马达的表面温度可以在失效之前达到90℃以上。这个温度更热比人可以在不燃烧的肌肤触感。出于这个原因,与人类接触的机会很高装式马达从区域隔开。
步进电机的设计在,因为他们在开环控制系统用的高温下运行。因为开环步进电机没有任何电流反馈(或速度或位置反馈)动作,由驱动器提供的电流是恒定的,而不管扭矩需求的。
为了从步进电机获得最大的扭矩,制造商在指定时考虑到B类绝缘;因此,电流额定值的设计,以最大限度的扭矩输出而不过热。最终的结果是步进电机产生了很大的扭矩,但是它们在这样做的时候也会变得很热。
3.“我可以使用12V电源来驱动我的电机吗?””
对于任何一种电动机的,不只是步进电机,电源电压是直接关系到电机的转速。因为较高的电压被提供给系统中,马达达到更高的速度。额定电源电压指定伺服和直流电机对应于其他规格的额定包括速度,扭矩和功率。
如果额定电压被指定一个步进电机,它是典型地不超过电机的绕组电阻倍额定电流。这是用于产生保持转矩但很少使用的,当步进电机移动有用的。
像所有的电机一样,当轴开始运动时,步进电机产生一个反电动势(BEMF)电压,阻止电流流入绕组。为了产生可用的转矩,电源电压必须大大高于BEMF。由于没有硬性的规则存在指定多高的电源电压,用户应该审查已公布的速度-扭矩曲线给定的步进电机,驱动器,和电源组合。
在速度-扭矩曲线中指定的电源电压是必要的信息。如果忽略,比如当发布的曲线使用48v电源时使用12v电源,电机将达不到预期扭矩。看到图2在下面。
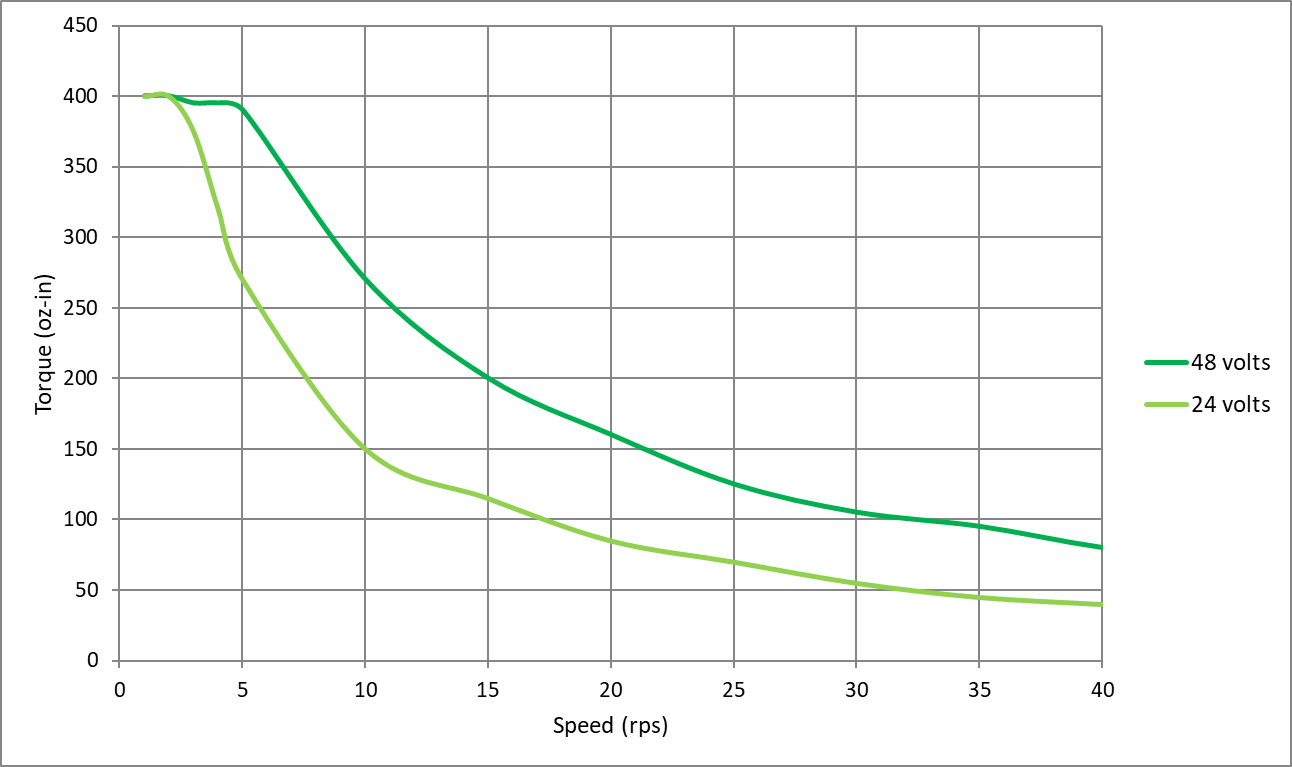
图2 -同一步进电机和驱动组合的两个速度-扭矩曲线。只有电源电压不同。深绿色线表示48v电源下的失速扭矩。浅绿色线表示在24v电源下的失速扭矩。而12v电源则会刺激更低的曲线。
4.我不能用几个PLC输出来运行这个步进电机吗?为什么需要驱动?”
两相步进驱动器使用一组连接,以形成一个H桥8个的晶体管。创建从PLC输出等效H桥需要八个输出。具有六个引线一些两相步进电机与驱动少至四个晶体管。对于这些,你可以使用4个PLC输出,以向前和向后旋转步进电机。然而,步进驱动确实不是简单序列中的H桥中的晶体管等等。
步进驱动利用母线电压的PWM开关来调节电机各相的电流。正如前面关于电压的部分所指出的,电源电压必须足够高,以克服BEMF并在速度下产生转矩。
步进驱动器与微步进功能进一步细化PWM根据正弦波在各相中切换的逻辑比的电流,获得比步进电动机的基本步距角更精细的定位。超越最基本的步进驱动器,那些在船上轨迹发生器能自动坡道电动机转速上升,并根据预设的加速度和减速度下降。
使用PLC输出驱动步进电机可能是一个整洁的项目,有人感兴趣的解剖如何步进电机工作。对于任何严肃的运动控制项目,你都需要一个合适的驱动器。
5.“电机是这么吵......一定有什么不妥的地方。”
每当步进电机迈出一步时,当转子就位时(想想弹簧上的经典质量),它就会产生一点清脆的噪音。振铃是电机的自然共振频率,这是基于电机的结构。当电机步进频率接近或等于固有谐振频率时,固有谐振频率被放大。
当步进电机以全步顺序驱动时(可用的最低分辨率;等于电机的步进角),低速时,通常在每秒1至5转的范围内。
当用户第一次测试步进电机时,将电机卸下并与任何负载断开连接,最常出现噪音问题。在这种情况下,电机是自由的共鸣,因为它喜欢没有任何东西阻尼的共振。
幸运的是,一些简单的步骤可以缓解这种共鸣:
- 通过安装所述电动机和所述电动机轴的负载耦合的机械阻尼添加到该系统。联接轴的负荷增加的惯性或摩擦到系统中的一些量......而这又改变或衰减电机的自然共振频率。
- 用微步减小步进角。微步进时,步进角随着步进的增大而减小,激发的固有谐振频率也减小。
如果这两个步骤都不工作,考虑使用步进驱动器与反共振算法内置于其当前控制逻辑。
6.“我需要一个编码器来运行步进电机,对吗?””
不,编码器不需要在开环控制步进电机运行。步进电机是唯一类型的无刷直流电机,准确和重复定位负载使用开环控制。其他电机需要某种类型的位置反馈。开环控制在以下情况下工作良好:
- 运动任务随着时间的推移是一样的。
- 负载不会改变。
- 所需的速度相对较低。
- 不能完成运动任务不会导致关键或危险的机器故障。
如果应用程序不满足规定的标准,考虑引入反馈到系统,以允许某种程度的闭环控制。在步进电机系统中添加编码器可以带来很多好处,从基本的开环控制,到完全闭环控制,步进电机作为伺服控制系统的一部分。请与您的步进电机和驱动供应商联系,了解他们提供的反馈和闭环控制选项的范围。
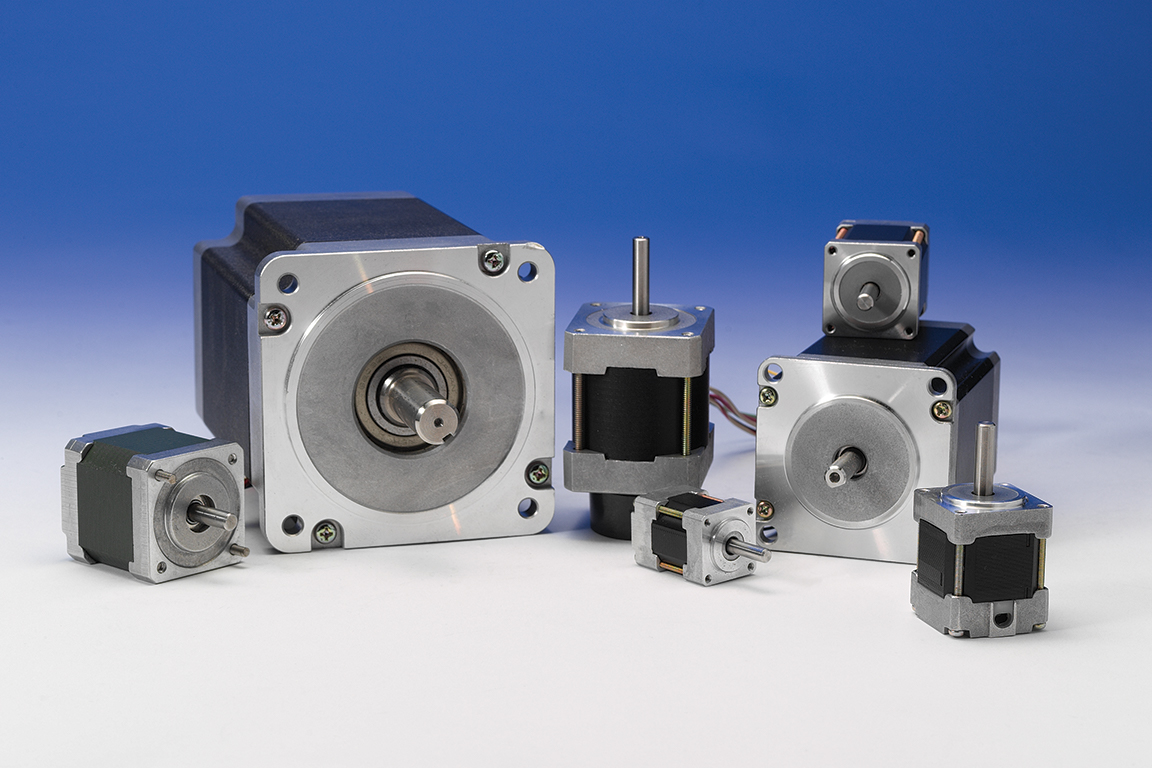
应用运动产品步进电机有广泛的框架尺寸-从NEMA 8到NEMA 42和更多。
了下:3D打印•添加剂制造•立体光刻,机器人报告,驱动器(步进器)+放大器




告诉我们你的想法!