


VG10真空夹具不使用外部压缩空气来产生吸力。它创造了具有自包含气流的内部空气供应,并具有两个单独的真空通道。来源:onrobot.
多年来,机器人使用了多种类型的夹具,但由于电子商务订单履行和其他应用的需求上升,推动对更多手动的灵活性变得更加紧迫。各种对象的人类级操作是一种艰难的技术挑战,机器人开发人员和供应商已经回应了一系列解决方案。
从爪,平行和旋转夹具到波纹管,磁的, 和真空夹具,机器人操纵已经发展,以满足行业的需求,包括汽车和电子制造和食品加工。
随着协作机器人臂或COBOT的兴起,机器操纵已经多样化以处理各种各样的物体。工业机器人可以使用平行线或旋转夹具,用于快速,重复处理相同的部件,但Cobot用户需要灵活性和安全超过吞吐量。
除了消费者包装的商品外,机器人夹具的市场还包括机器抚养,药品,塑料和农业和食品加工。在性能要求方面,甚至更专业化臂末端工具(eoats)为海底探索,手术和危险材料处理。
 keynotes.
keynotes.机器人夹具的制造商设计了他们的产品,可以使用多种工业和协作机器人武器。假肢的进步已平行于发展机电和气动夹具。更好的传感和控制,更轻的材料和更有效地利用空间和力量继续使夹具成为一个值得一看的机器人区域。以下是五个进展:
1.工作的合适工具
机器人夹具必须适用于它们处理的物体的尺寸,重量和刚性以及所需的尺寸精确。例如,鞋盒比螺钉,大型托盘或收缩包裹的衬衫更容易移动。
与机器人一样,Cobot Eoat设计师和用户应考虑对安全性的循环时间,扭矩和形状和力限制的竞争需求。环境污染物和接触模式是其他因素要注意。
几家公司,如destaco.,提供可定制的最终效果,以与特定项目或材料合作。
机器人供应商越来越多地提供套件,包括夹具,传感器和软件。例如,基于魁北克市的Robotiq已经成长不仅通过销售产品,而且还解释了这种组合的价值。
来源:Robotiq.
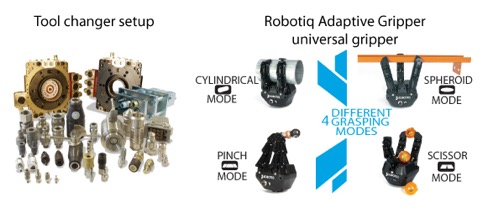
合作机器人空间的大部分注意力一直在开发终端效应器,这与安装在机器人臂一样易于安装和使用。而不是尝试使用单一末端执行器来完成所有事情,工具更换器旨在使更容易地快速交换机器人夹具。
“自动手册”工具更换器的主要供应商包括ATI工业自动化,应用的机器人,SAS自动化那Schunk., 和斯蒂布利。
2.钳夹手指
虽然人类水平的灵巧可能不是开发商和供应商的目标 - 超越它是 - 新材料和夹具类型使机器人比以往任何时候都更加可靠和灵活。
Robotiq.三手指自适应夹具旨在最大限度地减少具有高度定制性的刀具变化,为高精度的专利机制,以及用于UR武器的即插即用套件。
onrobotRG-FT智能夹具在去年的IMT中首次亮相,包括六轴力和扭矩传感器。
基于丹麦的公司新的Gecko夹具使用了欧登塞生物启发的微观茎秆比当前静电方法更有效地抓住扁平物体。
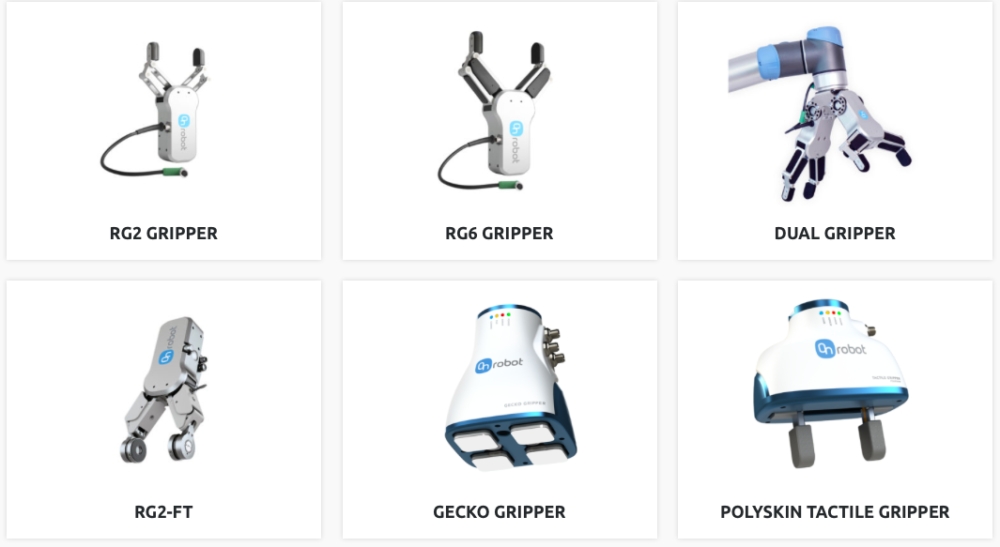
Onrobot提供各种机器人夹具。
并非所有机器人夹具都使用手指或夹具。罗切斯特理工学院的研究人员有学习大象树干对于抓握,Festo有复制了章鱼触手。另外,帝国机器人versaball.在其气球状夹具中使用颗粒状干扰。
onrobotPolyskin触觉夹具是机器人抓握的一个例子用触觉传感器。力传感可以改善脆弱物品的操纵,如鸡蛋或灯泡,以及安全在机器人与人类合作的过程中。
3.抽吸新方法
新一代真空夹具不需要外部供气以产生吸力。这导致吸力夹具较小,更节能,更少的整体足迹。
Saarland大学的研究人员已开发出来“人造肌肉“在没有压缩空气产生的吸尘器中产生吸力。
该技术基于镍钛合金的形状记忆特性,能够“记住”其形状并在变形后返回到该原始形状。通过开启和关闭流向该肌肉的电流,它合同以在橡胶膜内产生真空,并放松以释放它。
Onrobot提供真空夹具,该吸尘器不会使用外部压缩空气,其VG10它获得了去年购买紫色机器人时。VG10具有高达10kg(11磅)的有效载荷,内部空气供应,具有自包含气流,以及两个可同时使用不同抽吸功率和丢失握号的单独真空通道。
“更多的电夹子正在出来,我们将继续看到这一点,”奥本Østergaard,联合创始人和普遍机器人CTO表示。“五或十10年前,一切都是气动。现在,一切都在电动。“
4.结合方法
在过去的一年中,有几家公司拥有夹具的组合类型,以获得更可靠的挑选操作。右边机器人'RightPick拥有真空夹具和手指,并在云中使用计算机视觉和机器学习。

使用夹钳结合手指和吸力,右翼线在DHL事件下达到每小时800至1,000单位的拾取速度。资料来源:Righthand Robotics
紫色机器人,这是由前通用机器人工程师推出,提供双重握把功能它的PR10,包含爪和真空夹具类型。
软机器人SuperPick系统由AI控制并增加真空它符合其符合夹具。
加州大学伯克利大学的研究人员最近创建了灵巧的网络(DEX-NET)4.0为“二手机器人抓住政策。“在这种方法中,对一个平行的钳口和真空夹具进行验证的机器人,掌握500万合成图像的文库。有两个臂和夹具,机器人可以选择哪一个用于特定任务。
“在具有两台夹具的物理机器人上,DEX-Net 4.0政策一致地清除最多25个新的物体的垃圾箱,可靠性超过95%,每小时300多个平均选择的速度,”UC Berkeley团队报告。
onrobot在过去一年创作从机器人,光学和感知机器人的合并说明了不同类型的整合。刀具提供商的数量可能会发生变化,即使炽热增殖和Cobot制造商挑战普遍机器人以获得统治。
5.改进的传感器,AI引导夹具
在最近的机器人操纵的发展中是加入机器学习,由大数据集馈送并通过工业互联网连接。与其他形式的人工智能一样,这取决于可用的数据量,无论是机器视觉的处理是否发生在边缘或云中,以及所使用的传感器类型。
例如,替代的ai.正在为机器人开发“人为综合情报”。基于旧金山的公司的“虚拟认知计算机”软件使用摄像机的图像来指导机器人夹具如何接近对象。换句话说,机器人可以通过观察和与现有模型进行比较来教授自己。

来源:vicarious ai
新加坡科学,技术和研究机构的研究人员(A * Star)研究所和日本的CNRS-AIST联合机器人实验室已经创建了一种允许机器人的算法用自己的手比较形状确定如何最好地移动对象。
在传感器侧,基于Mase.的Veo Robotics在工作单元中使用一套相机添加协作安全功能到工业机器人。
NVIDIA的深度对象姿态估计系统使机器人能够确定对象的位置使用来自单个图像的数据。

资料来源:获取机器人
6.移动操纵
有时被描述为电子商务自动化的“神圣格拉勒”,与移动平台的Cobots组合直到最近一直难以捉摸。
获取机器人的货物自主移动机器人更为已知,但其获取移动操纵器可用于研究人员。
IAM机器人Swift可以选择物品从架子上,将它们放入箱子,它可以在船队中运行。
这movo beta.来自Kinova,它使轻质手臂,夹具和其他机器人部件零售为一个研究平台。它在机器人操作系统(ROS)上运行,并包括同时定位和映射(SLAM)功能。
去年丰田AI Ventures发布了“创新的呼吁”,重点是其计划辅助机器人的移动操纵。它最终投资了小学机器人学。
cobots抓住了
机器人开发人员,供应商和用户组织的软件和硬件工程师比构建或为每个任务选择专业工具提供更多选项。腋下末端的宽度增加,以及更复杂的传感器,数据分析和连接,正在推动新一代的机器操纵。
2017年,在非汽车应用中使用eoat增加了20%,而且汽车中的14%相比机器人行业协会。
全球合作机器人市场,这是一个小而扩大的工业自动化部分,将经历增长的复合年增长率为49.8%,预测ABI研究。ABI表示,它将从2017年的2.92亿美元增长到2025亿美元至123亿美元。这种增长将受到小型和中型企业的推动和对可以处理各种物品的更安全机器人的需求。
编辑注意:本文的版本首先出现在打印版本的机器人报告和设计世界。
提交:AI•机器学习那机器人报告那机器人•机器人夹具•终点效果




告诉我们你的想法!