

增加移动机器人中的导航自主程度为那些雇用它们的公司创造了有形的业务益处。但是设计自主导航系统并不容易任务。
圣地亚哥为基础大脑公司,这在我们的首发发言机器人峰会和展示然而,似乎已经弄明白了。该公司于2017年中期筹集了11400万美元,由SoftBank Vision基金领导,为其脑底地平台创建自主硬件和传感器的自主机器人。
Savioke最近宣布将把BrainOS集成到其商业服务机器人中。多年来,Savioke使用ROS从头开始构建自己的自主导航堆栈,但这种情况将不复存在。
“我们希望专注于萨维克可以是独一无二的领域,而不是我们没有竞争优势的领域,”Savioke创始人和首席执行官史蒂夫表兄弟最近被告知机器人报告.“Brain公司正在做一些有趣的事情,可能会在成本方面改变游戏规则。他们能够控制传感器的数量定价,而我们做不到。他们设计的东西很好地结合在一起。”
当然,许多机器人开发人员仍然希望开发自己的自主导航系统。Brain公司也很清楚这一点。为了帮助他们,Brain公司创新总监Paul Behnke和创新副总裁Phil Duffy在网络研讨会上分享了“机器人:初创公司的迪卡侬“在设计自动导航系统时,你会遇到以下挑战。
让软件正确
“这绝对是在考虑开发新环境的机器人时,”这一点肯定是思想的第一个问题,“Behnke说。
获取软件对机器人尤其具有挑战性,这些机器人将在动态环境中自动导航,例如机场,商场,仓库和其他高流量工作空间。这些区域通常具有狭窄的空间和不断变化需要复杂路线的障碍物。挑战是写入软件,可以考虑到最终用户处理这些问题。
机器人仍然涉及运营商的最小培训,通过演示和生产力报告,无环境设置,单次学习。
收集足够的真实数据
影响自主导航的变量不仅限于机器人工作环境中的物理障碍。无特征的环境,甚至一天中的时间,都增加了自动导航的复杂性。这些类型的障碍中有许多是边缘情况,在软件开发完成和机器人在实际环境中测试之后才会出现。边缘案例是你意想不到的打击。Behnke使用了这个例子:
“能够在一个混乱的动态环境中导航,很多人都在困难的声音。但是,大学的一个公开的体育馆就像缺乏功能一样困难。真的没有什么,锚定或绑在你建造你的地图时。“
成功与否取决于能否尽早将机器人以及运行它的软件应用到许多不同的环境中。功能性自主导航系统不是在实验室里开发的。Duffy表示,可以在那里开始开发,制作演示或获得资金。但这些阶段是实验室环境的极限。
“从商业上讲,除非你经历了很多场景,否则它不会起作用,因为你在野外遇到的问题是无法在实验室中复制的。”
您无法解决或预期您的机器人将在现实世界中遇到的每个边缘案例。保持客户的员工参与安装过程并为他们提供解决问题的工具,实时解决问题可以提高您的机器人的效率。
Duffy进一步使用的示例类似于从反射表面中误读的机器人,作为物理物体或红外加热器,扰乱机器人的路径。本质上,您可以解决的边缘案例越多,导航解决方案越好。数据是国王。
创建精密运动控制
达菲说,设计自主导航机器人的真正关键是创建一个具有精确运动控制的系统。
”对于很多机器人,你只是一个机器人从a点到b点脑公司,我们最初的市场推出这些工业地板护理机器,他们需要开车接近边缘,靠近墙,尽可能接近一个障碍最大化地板清洁我们提供的数量。”
如果您希望机器人能够处理复杂,狭窄的空间,高度准确的运动控制是必要的。这是你不能做的机器人有多少的占地面积。设计一个尽可能紧密和准确的系统,为您提供更好的方法来导航复杂的空间。
Brain Corp.分享了一个例子,展示了它的一台机器在狭小的空间中导航:
减少误报
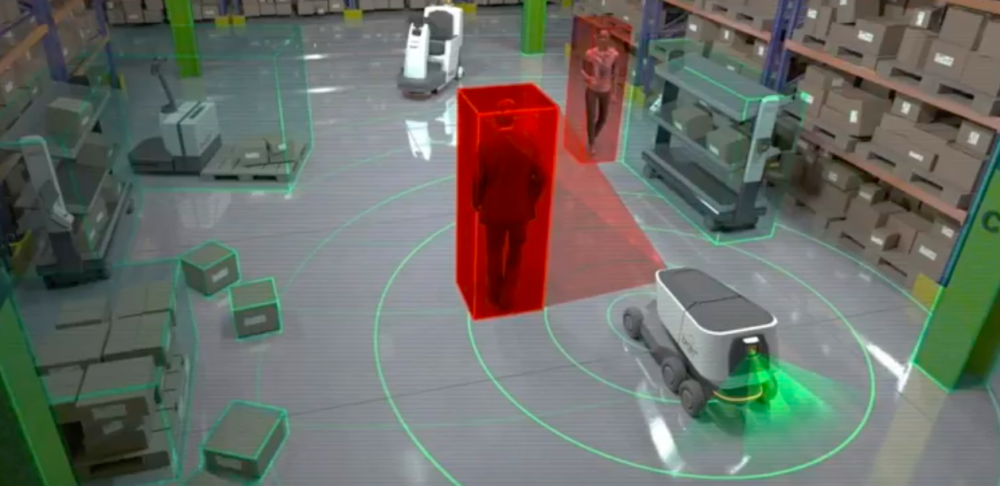
人类检测对于扩展最终用户应用是至关重要的。如果您的机器人无法从地板上的包裹中讲述一个人,那么您在开始之前就会妨碍您的业务。
“如果您正在开发自己的算法,如果您正在寻找在机器人项目中使用的导航系统,那么拥有一个可以识别人类对障碍的系统是必不可少的。除非您将在环境中清除每个人,除非机器人在限制应用程序中,否则您真的需要解决人类元素。这是你可以解决的最大问题之一,“达菲说。
然而,过度谨慎,也有问题。Behnke提到,当大脑公司用其地板清洁机器运行一些最初的试验试验时,机器人正在检查,暂停和分析,以便安全起见,因此它经常使人们舒适地舒适。人们认为机器人并不聪明,从而让他们在机器人周围感到不舒服。您将使用来自真实情景和虚拟环境的传感器数据和虚拟环境至关重要,以减少误报。
安装必须简单
对于您的产品真正可扩展,安装过程必须简单,而不是技术。今天的许多机器人都需要工程师安装到新环境中。该过程简单地超出了非技术人员的技能集。这种深入和技术上复杂的发射可以瓶颈这批评的早期阶段;拥有现场发送的工程师,每个新客户都不是可持续的或可扩展的。
应对这一挑战的一种方法是让您的客户确定哪些员工可能有能力将安装作为一个新项目。另一种是对设计进行预防性维护。你希望你的机器人在外观上与你客户的员工以前使用过的产品相似。确保用户界面精简且直观。Behnke使用了以下示例:
“我们想要保持它尽可能简单......如您在此处在此屏幕截图中看到,用户只有两种选择:选择路线或教导路线。”
这就是对付使用这些机器的非技术员工的秘密。我们设计了一个很容易使用的系统。用户要么像往常一样使用这台机器,当他们这样做时,它会创建一个空间地图并记录路线,要么他们就开始玩。”
了下:机器人报告




告诉我们你的想法!