

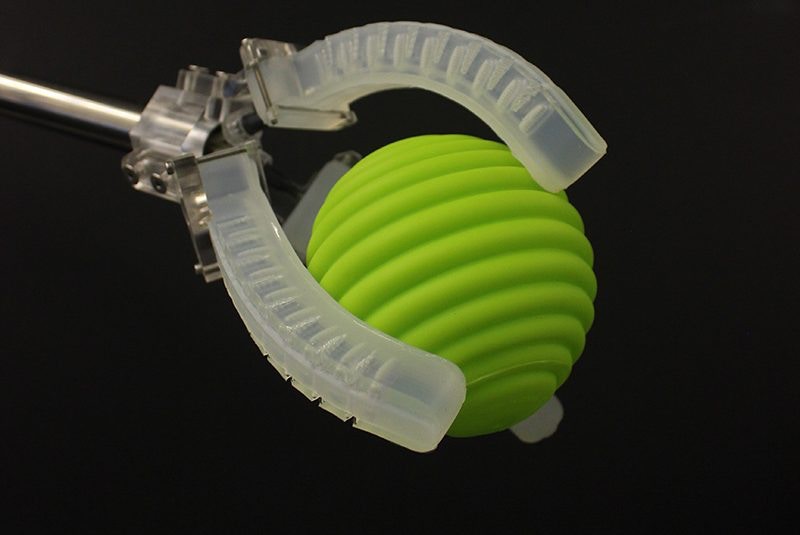
这种柔软的机器人抓手是哈佛大学研究人员开发的平台技术的成果,该技术旨在创造带有嵌入式传感器的软机器人,这些传感器可以感知各种各样的输入,如运动、压力、触摸和温度。(资料来源:瑞安·l·特鲁比/哈佛大学)
主要挑战之一在机器人工业中创建受自然启发的机器人.当然,这不是一项简单的任务,许多与创造仿生机器人相关的主要挑战多年来都没有改变。
在仿生机器人起飞之前,必须开发出能够将传感、驱动、计算和通信结合起来的材料。和研究人员从哈佛大学威斯生物工程研究所和Harvard John A. Paulson工程学院和应用科学学院正在做的那样。
研究人员开发了一个用于3D打印软机器人的平台,具有嵌入式传感器,以感受移动,压力,触摸和温度。这可用于跨一系列软机器人应用的集成感应,包括机器人辅助手术和机器人拣选。该平台依赖于已知的3D打印技术,称为嵌入式3D打印,其允许无缝地集成单个软体内的多个特征和材料。
但新方法的关键是研究人员开发的有机离子液体的导电油墨。该墨水可以是3D印刷在软弹性体基质中,具有许多软机器人的制造。团队说,将传感器嵌入软机器人一直很困难,因为大多数传感器都是刚性的。
“到目前为止,大多数用于软机器人的集成传感器/执行器系统都是相当初级的,”前SEAS博士后研究员、该论文的合著者Michael Wehner说。“通过直接在这些软系统中打印离子液体传感器,我们为设备设计和制造开辟了新的途径,最终实现对软机器人的真正闭环控制。”
为了测试这些新的传感器,该团队打印了一个三指柔软的机器人抓手。研究人员测试了夹持器感知膨胀压力、曲率、接触和温度的能力。它们嵌入了多个接触传感器,这样夹持器就可以感知轻触和深触。
“软机器人通常受到传统造型技术的限制,这限制了几何形状的选择,或者,在商业3D打印的情况下,材料选择阻碍了设计选择,”Wyss研究所核心成员、SEAS工程和应用科学查尔斯河教授Robert Wood博士说。也是这篇论文的合著者。“刘易斯实验室开发的技术有机会彻底改变机器人的创造方式——摆脱顺序过程,创造具有嵌入式传感器和驱动器的复杂和单片机器人。”
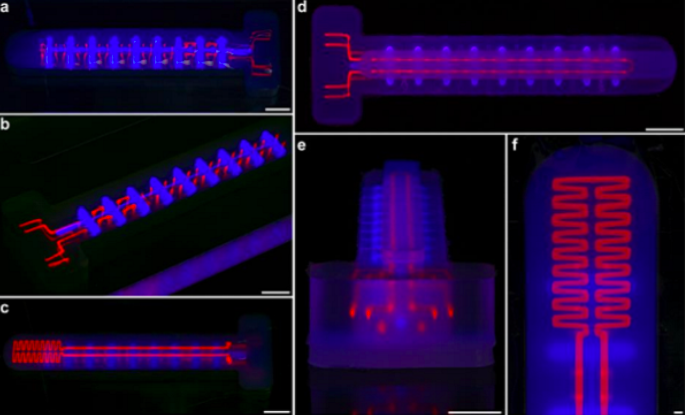
研究人员使用多边嵌入式3D打印技术将导电离子墨水集成到驱动器体内。
研究人员的下一步是使用机器学习培训软机器人夹具以掌握不同尺寸,形状,表面纹理和温度的物体。
研究人员在他们的工作中发表了一篇论文,标题为“通过嵌入式3D打印软沉积物执行器”先进材料.这是论文中的摘要:
“人类拥有灵巧的手,运动技能,和其他身体能力,依赖于身体感觉系统提供的反馈。在这里,报道了一种通过嵌入式3D打印创建软体敏驱动器(SSAs)的方法,该方法由多种导电特征支配,同时实现触觉、本体感觉和热感觉。这种新颖的制造方法能够将多种离子导电和流体特性无缝集成到弹性体矩阵中,从而生产出具有所需的仿生传感和驱动能力的ssa。每个打印传感器由离子导电凝胶组成,具有长期稳定性和无迟滞性能。作为一个示例,多个SSAs被组合成一个柔软的机器人抓手,通过嵌入曲率、膨胀和接触传感器(包括深度和精细接触传感器)提供本体感受和触觉反馈。该多材料制造平台可以使复杂的传感元件轻松集成到软驱动系统中,这是实现软机器人、机器和触觉设备闭环反馈控制的必要步骤。”
提交:3D打印•添加剂制造•立体光刻那机器人报告那机器人•机器人夹具•终点效果




告诉我们你的想法!