

剑桥,质量。 - 马萨诸塞州理工学院的工程师开发了一种磁力可操纵的机器人线,可以通过狭窄的绕组途径,例如脑大脑的迷宫脉管系统主动滑动。
在未来,这种丝状机器人可以与现有的血管内技术配对,使医生能够远程引导机器人穿过患者的血管,快速治疗堵塞和病变,如动脉瘤和中风。
麻省理工学院机械工程和土木与环境工程副教授赵宣和表示:“在美国,中风是第五大死亡原因,也是导致残疾的主要原因。”如果急性中风能在90分钟左右的时间内得到治疗,患者的存活率将显著提高。如果我们能设计出一种设备,在这“黄金时间”内逆转血管堵塞,我们就有可能避免永久性脑损伤。这是我们的希望。”
赵和他的团队,包括第一作者Yoonho Kim,一名研究生麻省理工学院的机械工程系他们在杂志上描述了他们的软机器人设计科学机器人.该论文的其他合著者是麻省理工学院研究生阿尔贝托·帕拉达和访问学生刘胜多。
把机器人线放到紧的地方
为了清除大脑中的血凝块,医生通常会进行血管内手术,这是一种微创手术,外科医生将一根细导线插入患者的主动脉,通常是在腿部或腹股沟。在透视镜的引导下,同时用x射线对血管成像,外科医生然后手动旋转导线进入受损的脑血管。然后,可以将导管沿着金属丝串起来,将药物或凝块回收设备运送到受影响的区域。
Kim说,这一过程可能会对身体造成负担,要求外科医生必须接受这项任务方面的专门培训,忍受荧光检查带来的反复辐射。
“这是一项要求很高的技能,而且根本没有足够的外科医生为病人服务,尤其是在郊区或农村地区,”Kim说。
在此类程序中使用的医疗导丝是被动的,这意味着它们必须手动操纵。它们通常由金属合金的核心制成,涂覆在聚合物中,Kim所说的材料如果电线暂时被卡在特别紧的空间中,则kim所说的材料可能会产生摩擦和损坏容器衬里。
该团队意识到,他们实验室的发展可以帮助改进这种血管内程序,无论是在导丝的设计上,还是在减少医生暴露在任何相关辐射下。
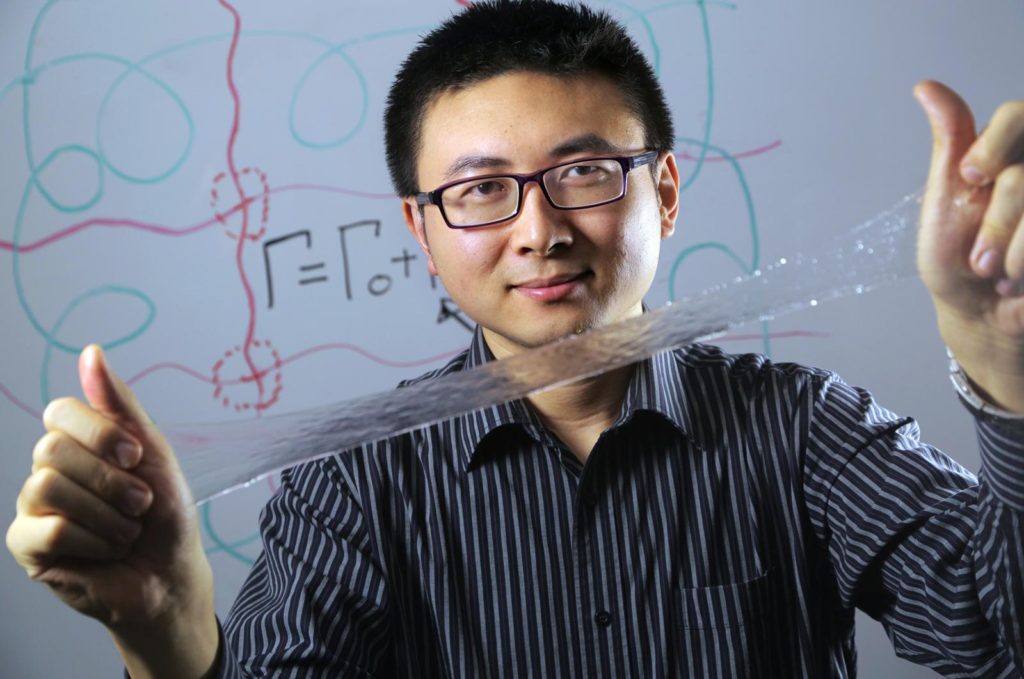
赵宣和,麻省理工学院机械工程和土木与环境工程副教授。来源:麻省理工学院
线程一根针
在过去的几年里,这个团队在这两方面都积累了专业知识水凝胶主要由水制成的生物相容性材料3 d打印magnetically-actuated材料它可以按照磁铁的方向爬行、跳跃,甚至接住一个球。
在这篇新论文中,研究人员将他们的工作结合在水凝胶在磁性驱动中,他们制造了一种磁性导向的,水凝胶涂层的机器人线或引导线,他们能够把它做得足够薄,以磁性引导穿过一个真人大小的硅胶大脑血管复制品。
机器人丝线的核心是由镍钛合金制成的,这种材料既可弯曲又有弹性。不像挂衣架,弯曲时可以保持形状,镍钛诺金属丝可以恢复原来的形状,使其更灵活地缠绕在紧密、曲折的血管中。研究小组在金属丝的芯部涂上一层橡胶糊或墨水,并在其中嵌入磁性颗粒。
最后,他们使用了一种他们之前开发的化学过程,将磁性覆盖层涂上并粘合起来水凝胶-一种不影响底层磁颗粒反应性的材料,同时为金属丝提供光滑、无摩擦、生物相容的表面。
![]()
机器人的报告已经启动了医疗保健机器人工程论坛会议和博览会的重点是改进下一代医疗机器人的设计、开发和制造。了解有关医疗保健机器人工程论坛的更多信息.
测试和添加功能到机器人线程
他们展示了机器人线的精确度和激活能力,使用了一个大磁铁,就像提线木偶的线一样,引导线穿过由小环组成的障碍,让人想起线穿过针眼的过程。
研究人员还测试了大脑主要血管的寿命硅胶复制品中的螺纹,包括凝块和动脉瘤,在实际患者大脑的CT扫描后建模。该团队用液体模拟血液的液体填充有机硅容器,然后手动操纵模型周围的大磁体以通过血管绕组,窄路径转向机器人。
金姆说,这种机器人丝线可以被功能化,这意味着可以添加一些特征,例如,可以提供减少血块的药物或用激光打破阻塞。为了演示后者,研究小组用光纤替换了线的镍钛诺核心,发现他们可以通过磁力引导机器人,并在机器人到达目标区域时激活激光。
当研究人员比较涂有水凝胶和未涂有水凝胶的机器人线时,他们发现水凝胶给了线一个非常需要的、滑的优势,允许它在更狭窄的空间中滑动而不被卡住。在血管内手术中,这种特性是防止血管内壁摩擦和损伤的关键。
MIT机械工程系的研究生Yoonho Kim。来源:麻省理工学院
避免辐射
这种新的机器人线是如何保证外科医生不受辐射的呢?金说磁力可行导丝使外科医生不再需要将导丝穿过病人的血管。这意味着医生也不必靠近病人,更重要的是,可以产生辐射的荧光镜。
在不久的将来,他设想血管内手术可以结合现有的磁性技术,比如成对的大磁铁,医生可以在手术室外,远离病人大脑的荧光成像,甚至在一个完全不同的位置操纵方向。
“现有平台可以应用磁场并同时对患者进行透视程序,医生可以在另一个房间,甚至在不同的城市中,控制磁场用操纵杆控制,”金。“我们的希望是利用现有技术在下一步中在体内测试我们的机器人线程。”
这项研究部分由美国海军研究办公室、麻省理工学院士兵纳米技术研究所和国家科学基金会资助。
了下:学生项目,机器人的报告,机器人技术•机器人抓手•末端执行器




告诉我们你的想法!